simchair4_collective_base
This is an old revision of the document!
Table of Contents
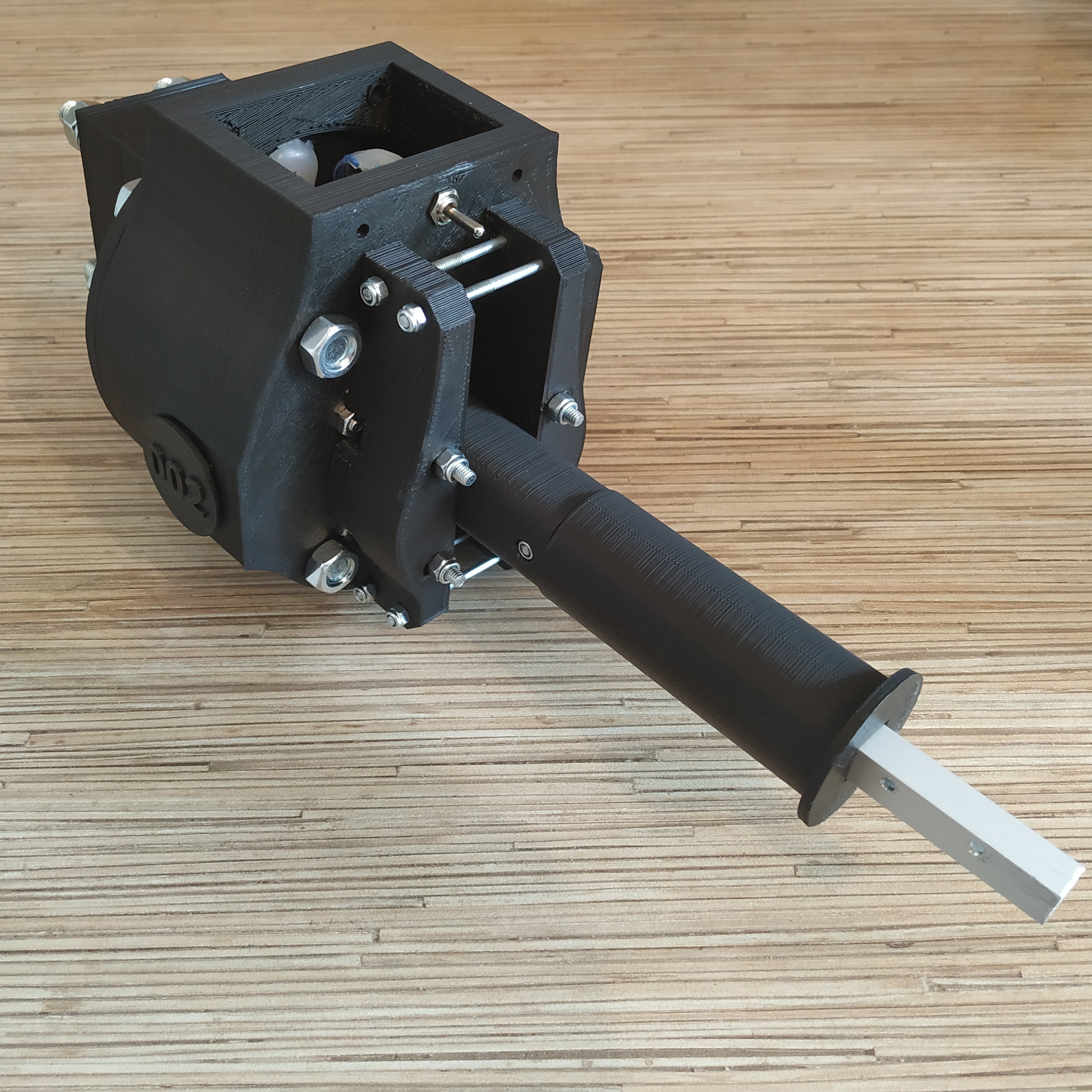
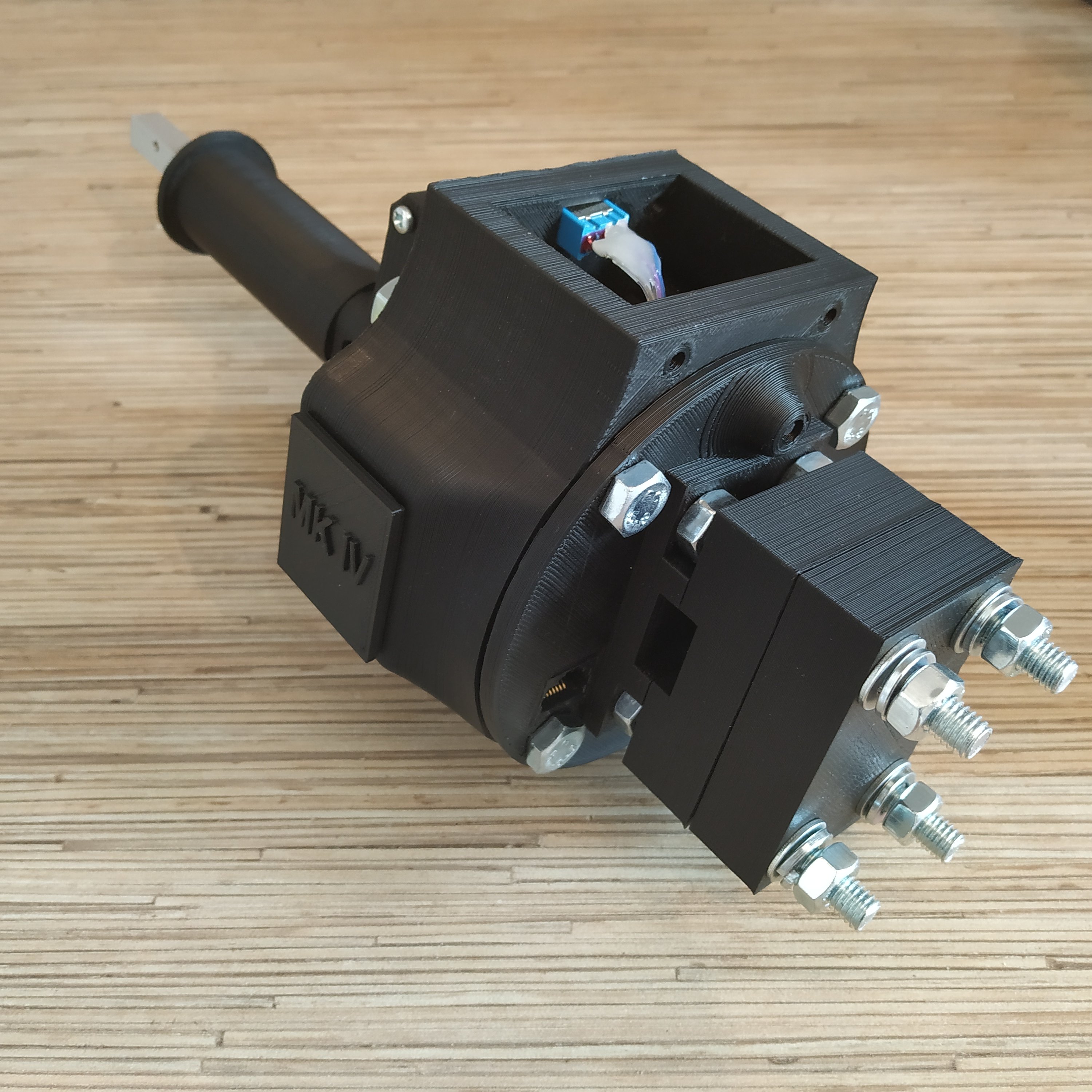
Simchair MKIV collective lever base
Components
- 1 x 10x10mm aluminum square pipe
- 1 x 20×10 aluminum rectangular pipe
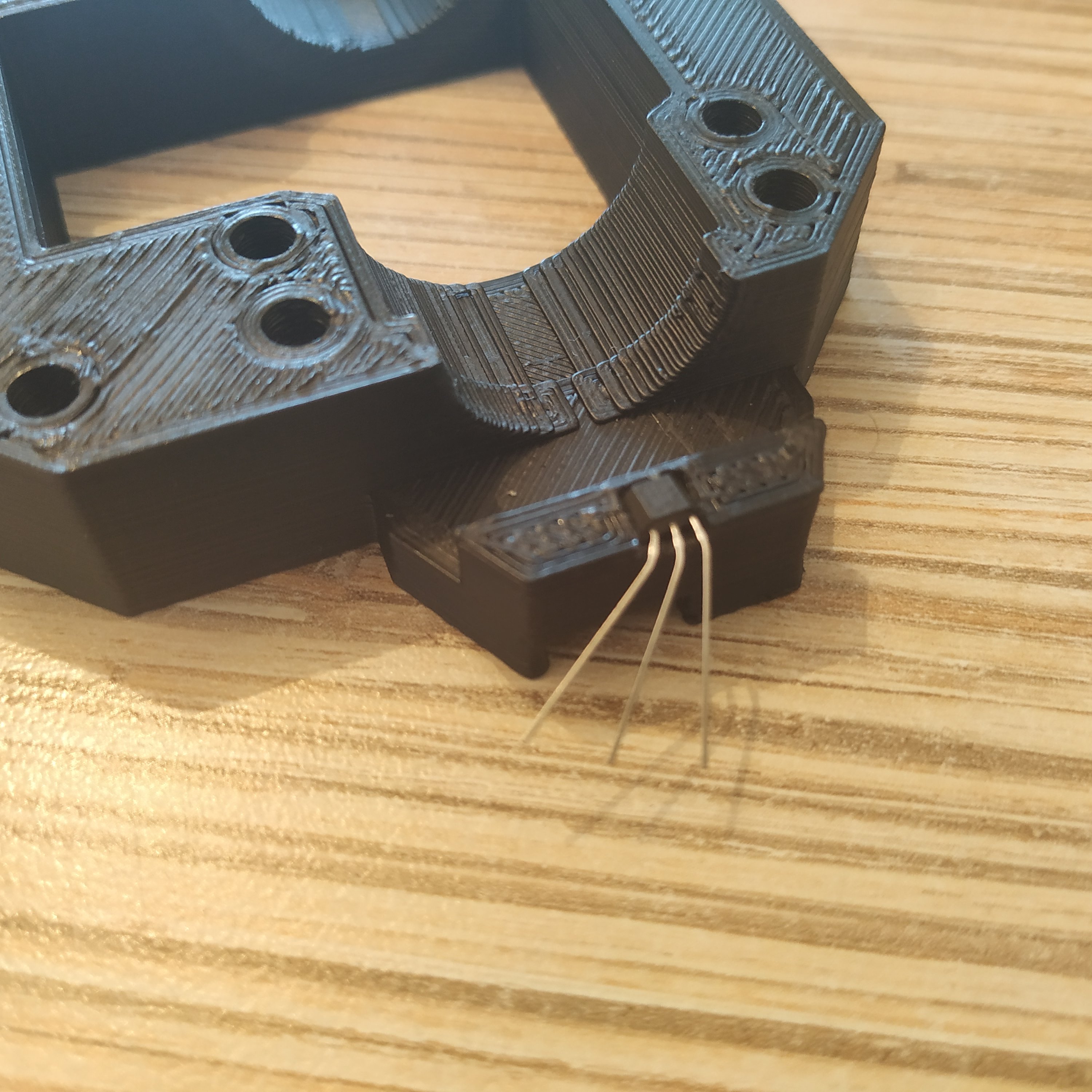
- 1 x SS495A1 hall sensor
- 1 x MTS-103 ON-OFF-ON switch
- 1 x 16K1 10KOhm LINEAR rotary potentiometer
- 1 x 6x6x4mm square magnet
- 1 x M6x70mm screw
- 2 x M6 washers (reinforced)
- 1 x M6 nut
- 2 x M6x18x8mm hubs
- 6 x M4x40mm screws
- 4 x M4x70mm screws
- 1 x M3x20mm screw
- 1 x M3 nyloc nut
- 4 x M4 nyloc nuts
- 4 x M3x50mm screws for tensioner halves contraction
- 4 x M8x70 bolts
- 4 x M8x75mm bolts
- 8 x M8 nuts
- 10 x M8 washers (regular, non-reinforced)
- 4 x M8 spring washers
- 1 x bag of M4 nuts
- 4 x 608 bearings (standard skateboard bearings)
- 1 x Arduino Pro mini
- 1 x Simchair MKIV Master controller
- super glue (cyanoacrylate), hot glue gun
Files location in repos
simchair4_models\printable components\peripherals\helicopter\collective lever\a_base - models
simchair4_software\peripherals - choose the preferred variant of the lever - software
Assembling manual
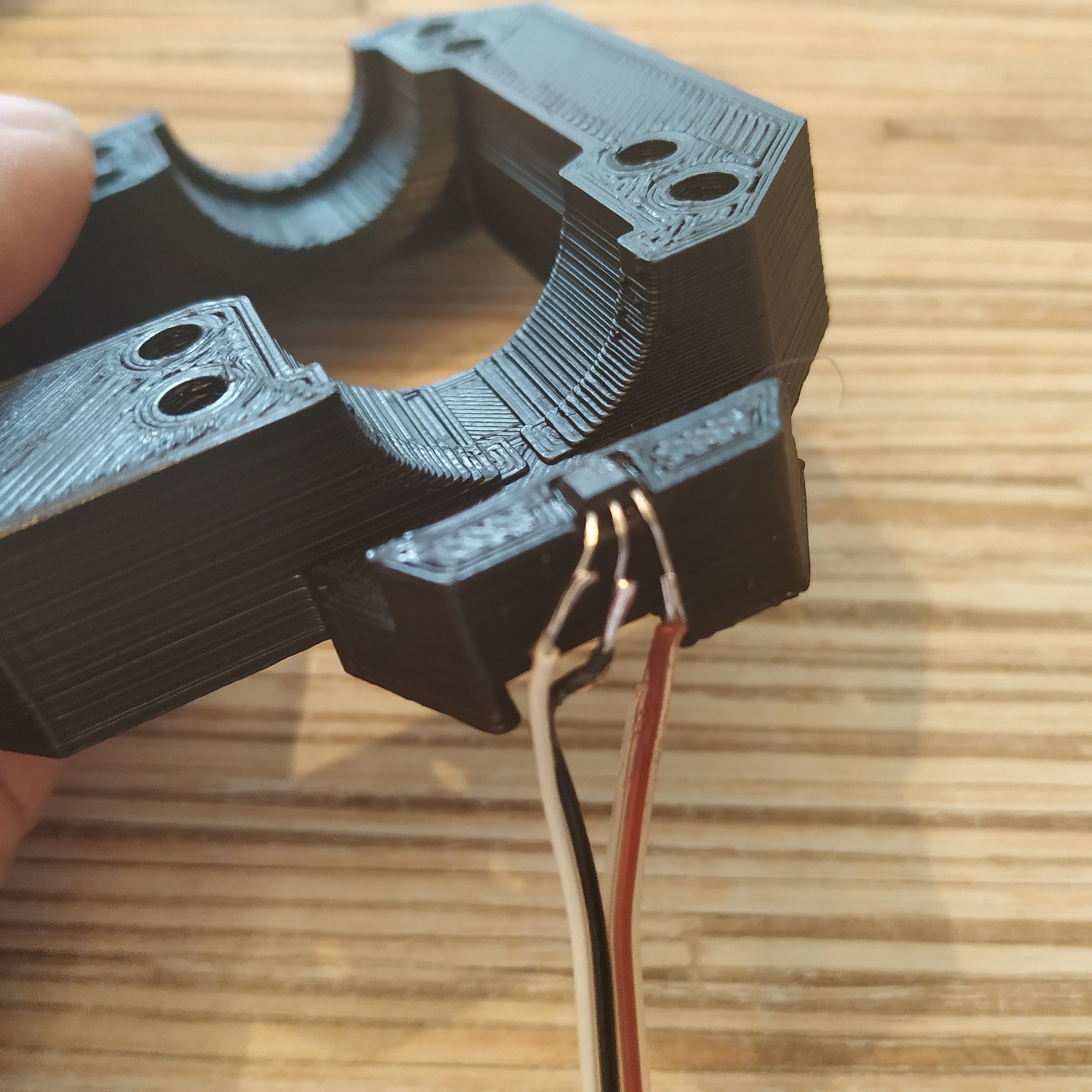
1. Insert SS495A1 into its socket in the top part of the lever frame (use a drop of super glue to fix it there) and solder its wires. Route wires as shown on the 3rd picture, use some glue as necessary.

2. Cut off a piece of 10mm square aluminum profile. Choose the length depending on the lever you want to build (as stated in the lever body manual, e.g. 200mm for a single throttle lever)

3. Put the lever connector part onto the rail.

simchair4_collective_base.1568493355.txt.gz · Last modified: 2019/09/14 22:35 by hc625ma
Except where otherwise noted, content on this wiki is licensed under the following license: GNU Free Documentation License 1.3
