
With VRMax head ported to the current line of the hardware, I’ve found that it’s now easier to exceed the available memory of the Leonardo, effectively bricking the controller.
So, what to do if it happened to you? No worries! You will need:
- a USBASP programmer dongle
- a 10 to 6 pin converter for it
https://cutt.ly/TnIrgWb
Install the driver for USBASP and connect it to the 6-pin ISP socket on the Leonardo.
https://myrobot.ru/downloads/programs/usbasp-win-driver-x86-x64-v3.0.7.zip
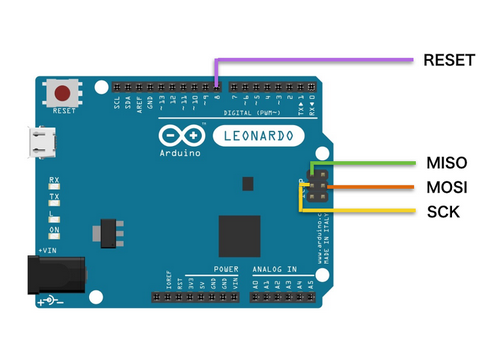
Select “Arduino Leonardo” from the boards menu in Arduino IDE and press “Write the bootloader”. After that, re-flash the Simchair firmware, and the controller is back to life again.