Here’s my first attempt to film a complete short flight between airports for a demo of the hardware, and it hasn’t gone without some errors and weird maneuvers ofc lol (because 3rd take lol!), please excuse that =)
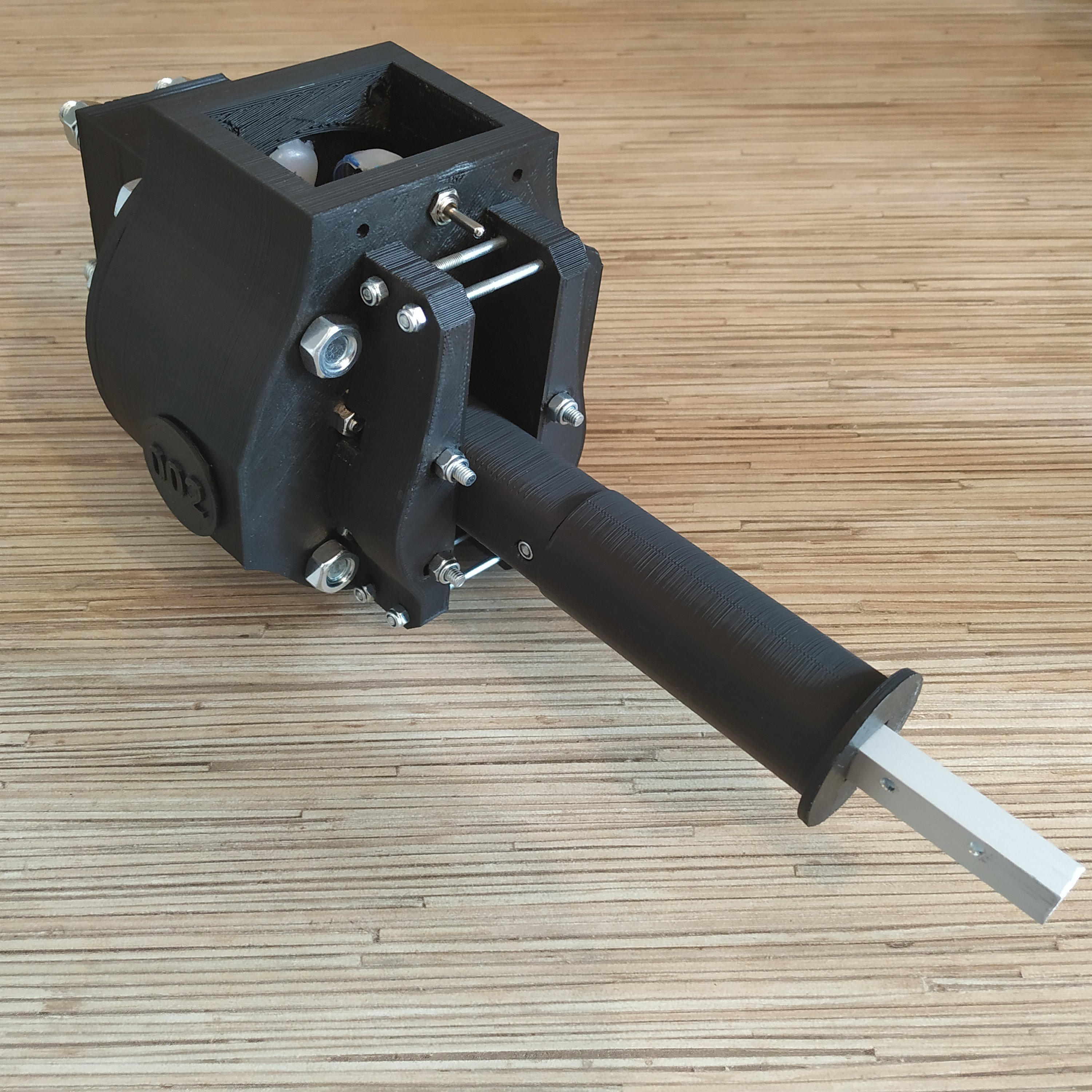
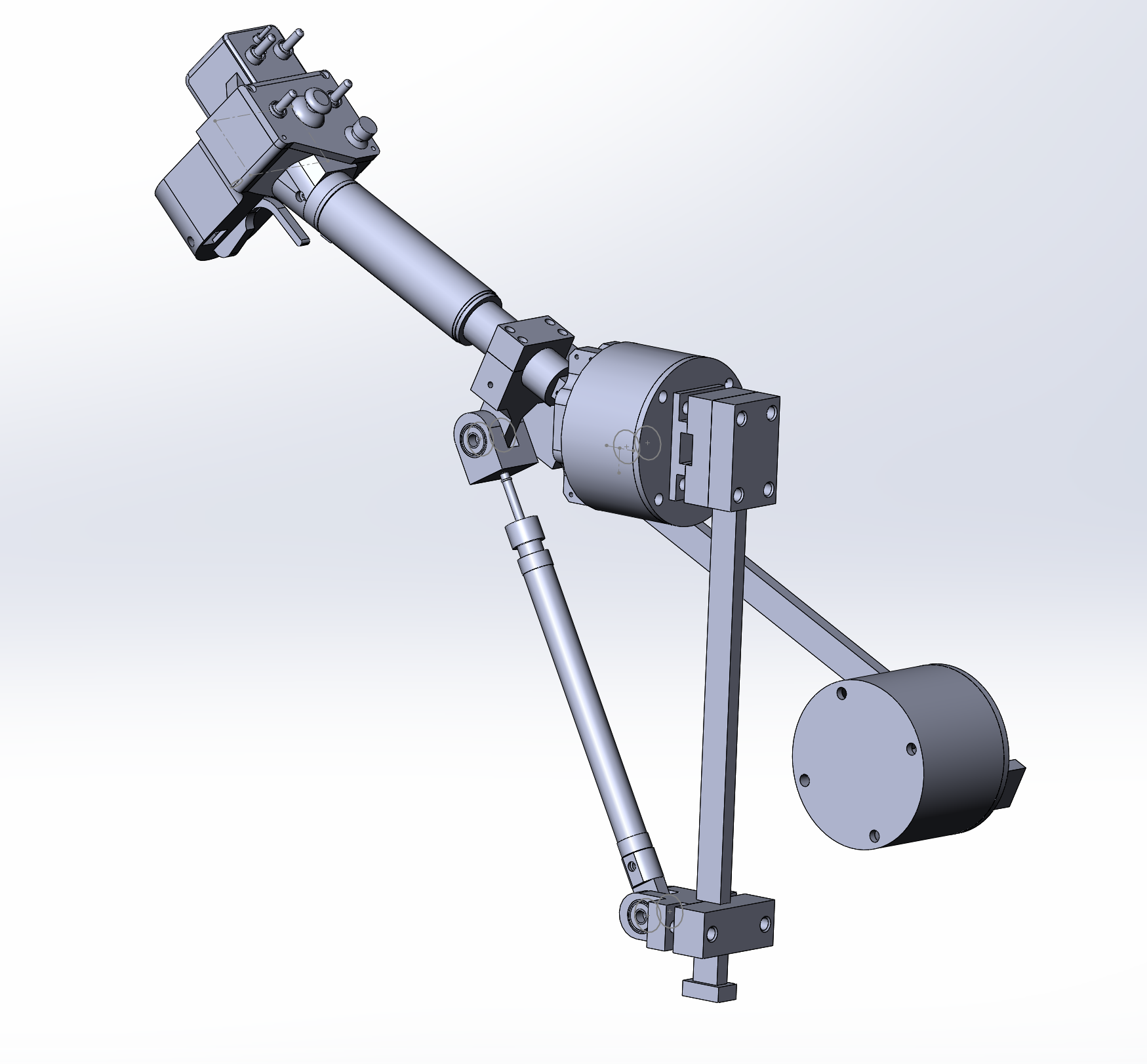
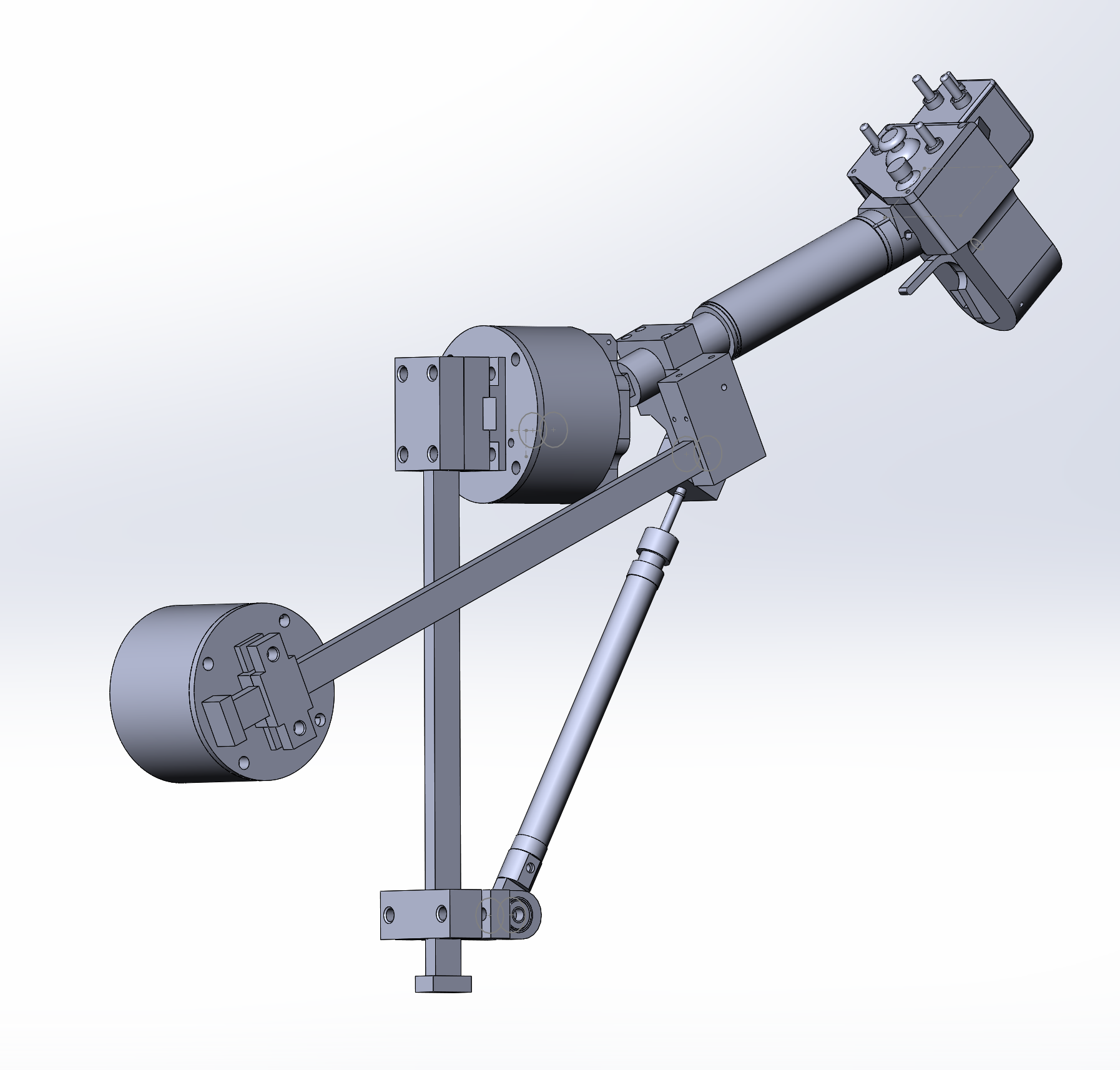
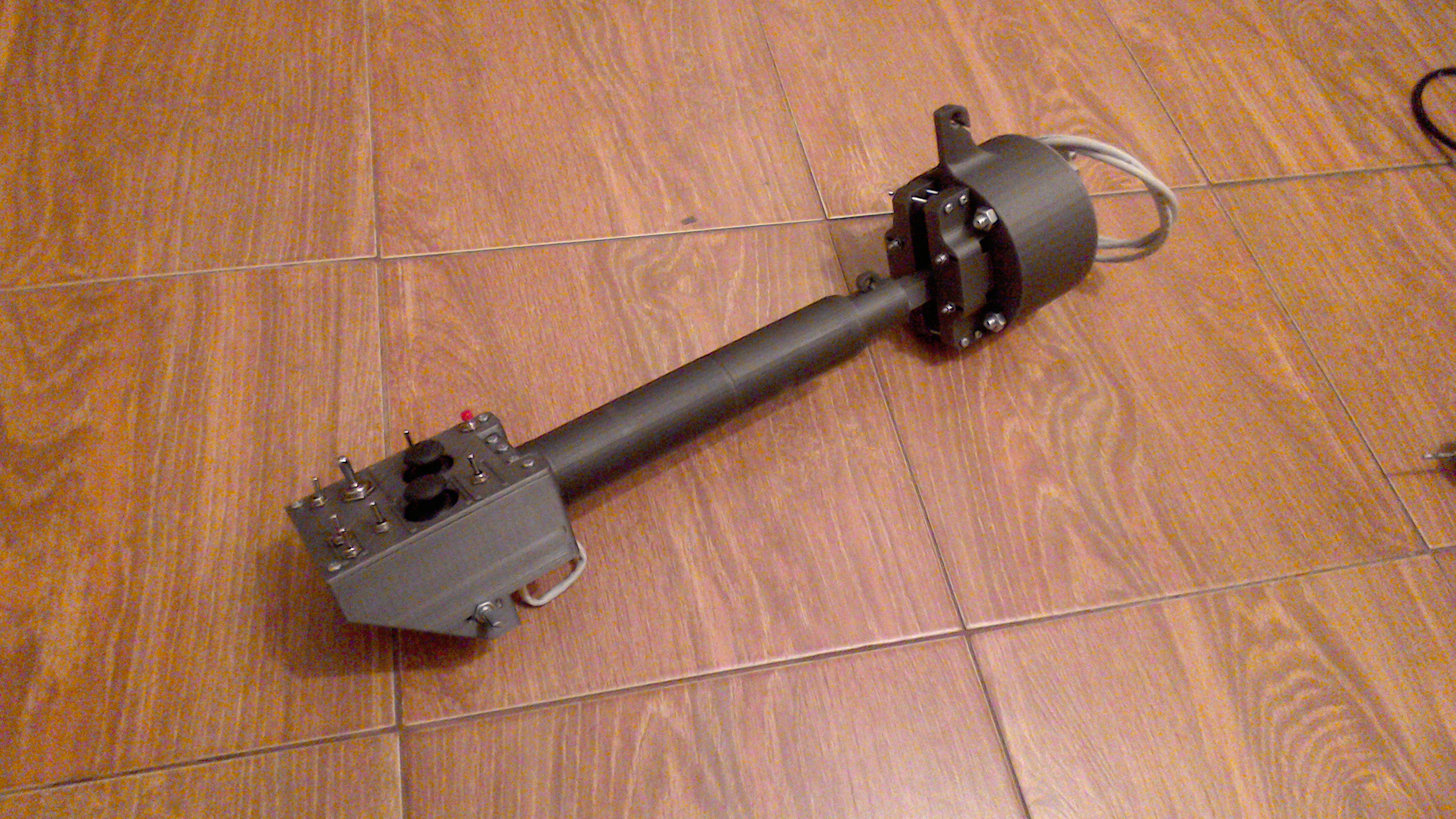
In the first part of the video, I show hardware up close, and then fly from 4S2 Ken Jenstedt to 35S Wasco state in XPlane 11 using KLICKITAT VOR for navigation, mainly to show the new radio panel of VRMaxII pedestal! =) You can also see how fun it is to fly with real VFR charts in PDF using Avitab plugin, rather than with a built-in map! Puts some extra workload on you during long (boring) straight flight legs =)
With a moving map, you only look out of the window because you’re bored. Without it, you have to constantly look for scenery highlights to check your position! I’d say try it, and you won’t regret!