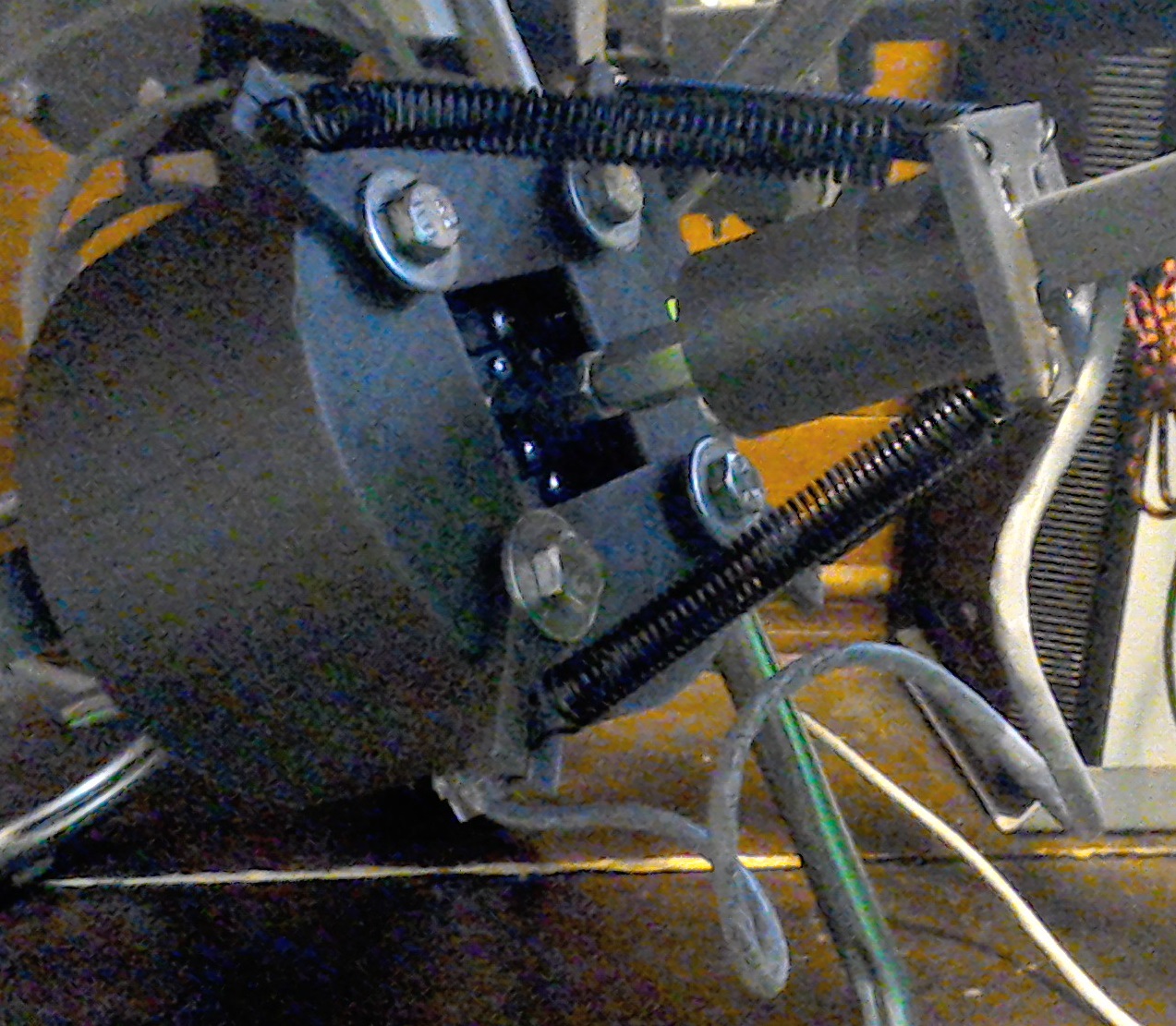
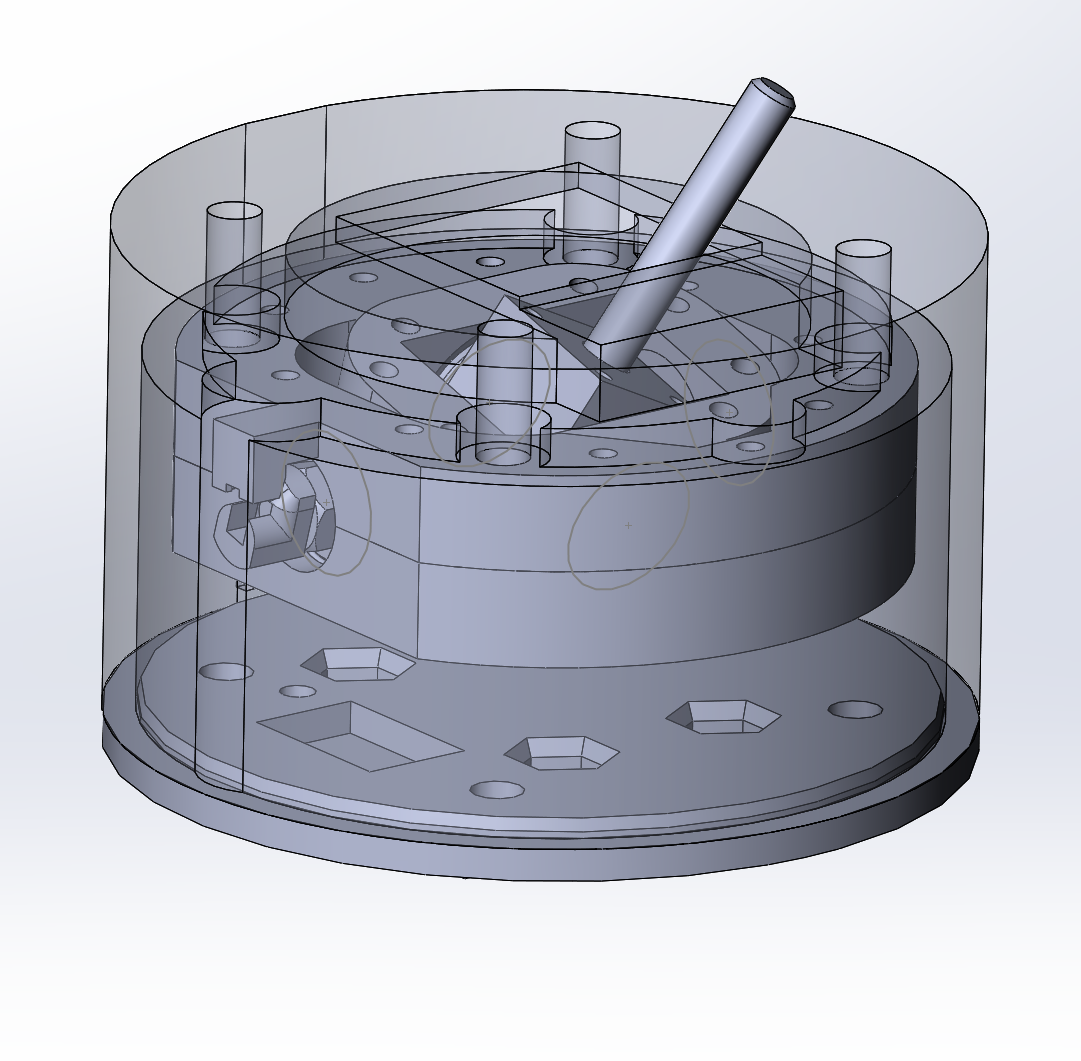
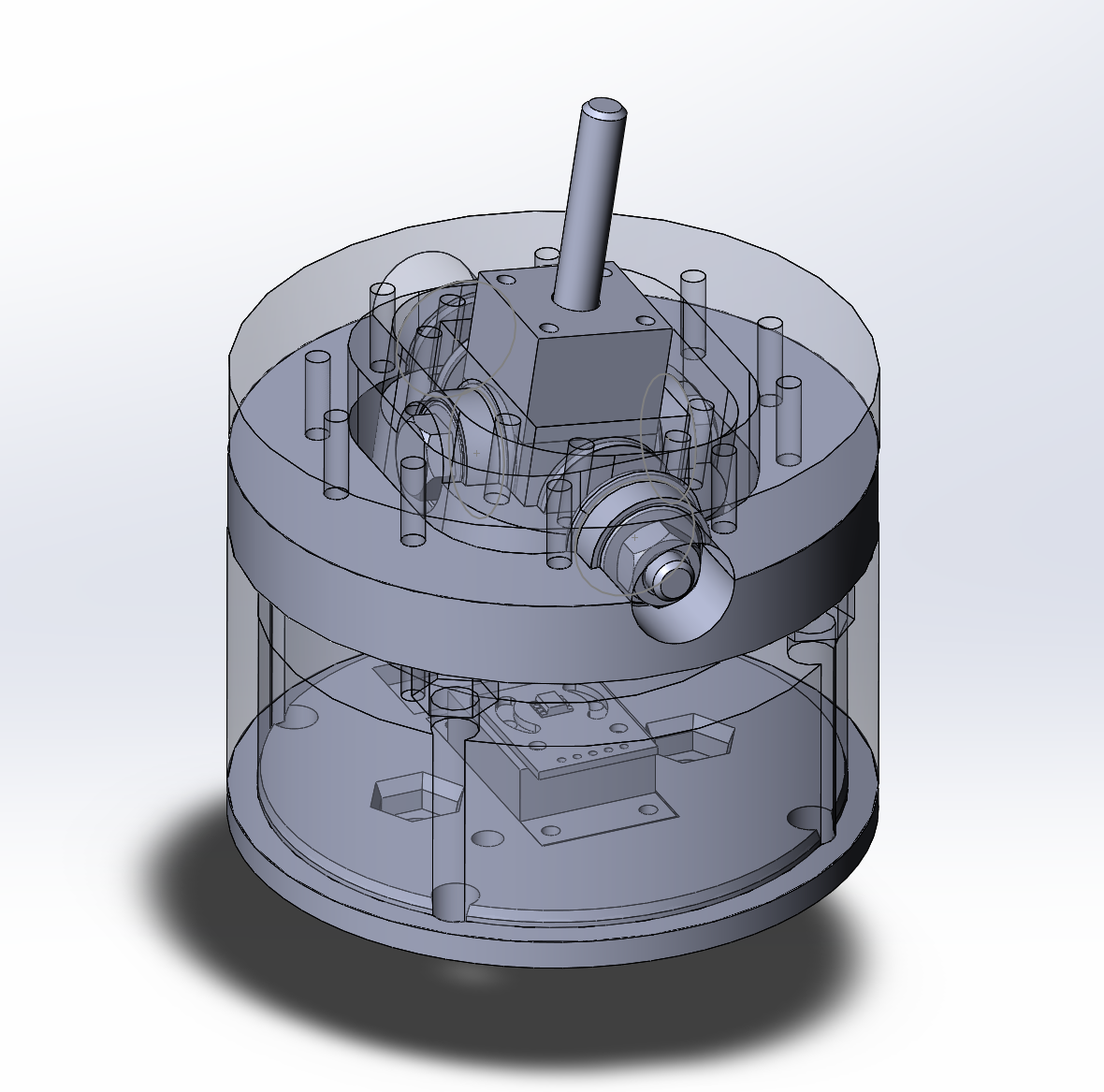
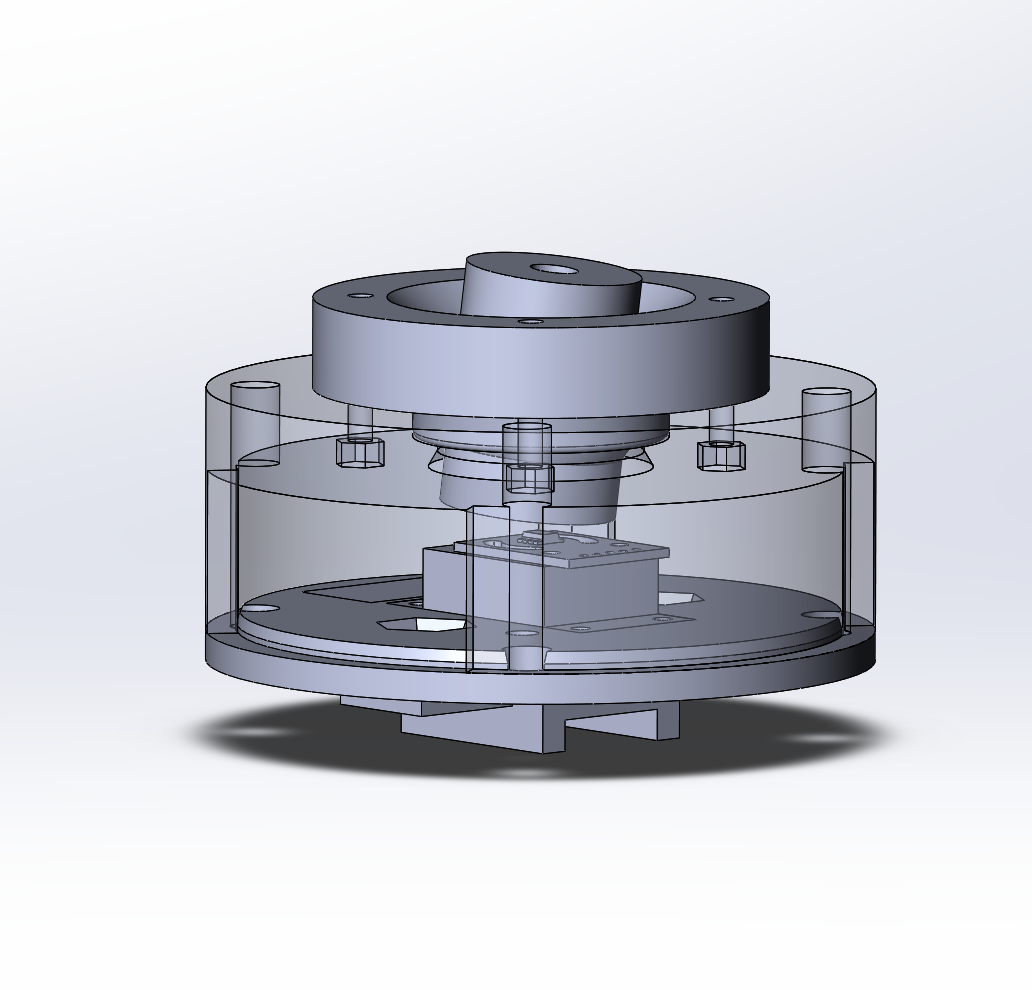
After flying with a spring-loaded reinforced gimbal for a while, I noticed that slight backlash has developed in a stick connector part. While it was absolutely tolerable and that part can be replaced easily, I thought it was a good idea to design a new cyclic frame for those of us who value absolute precision over being able to remove the stick when not in use by simply pulling it off its socket. The new stick frame is based on M8 bolts and mounted to the gimbal with nuts. The cool thing about it – you can easily adjust stick grip inclination (you can make a copy of AS350 stick for example) and fine-tune its dimensions to suit your anatomy. It can still be attached or detached quickly but requires 2 wrenches to tighten/loosen nuts properly. I think it will be a new recommended default for a spring-loaded cyclic.
As always, you can find parts for it on GitHub.
Here’s how it looks (note a slight inclination of the stick on the second photo):