With VRMax head ported to the current line of the hardware, I’ve found that it’s now easier to exceed the available memory of the Leonardo, effectively bricking the controller.
So, what to do if it happened to you? No worries! You will need:
a USBASP programmer dongle
a 10 to 6 pin converter for it https://cutt.ly/TnIrgWb
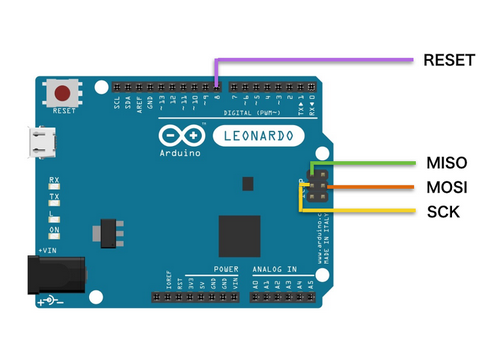
Install the driver for USBASP and connect it to the 6-pin ISP socket on the Leonardo.
Select “Arduino Leonardo” from the boards menu in Arduino IDE and press “Write the bootloader”. After that, re-flash the Simchair firmware, and the controller is back to life again.
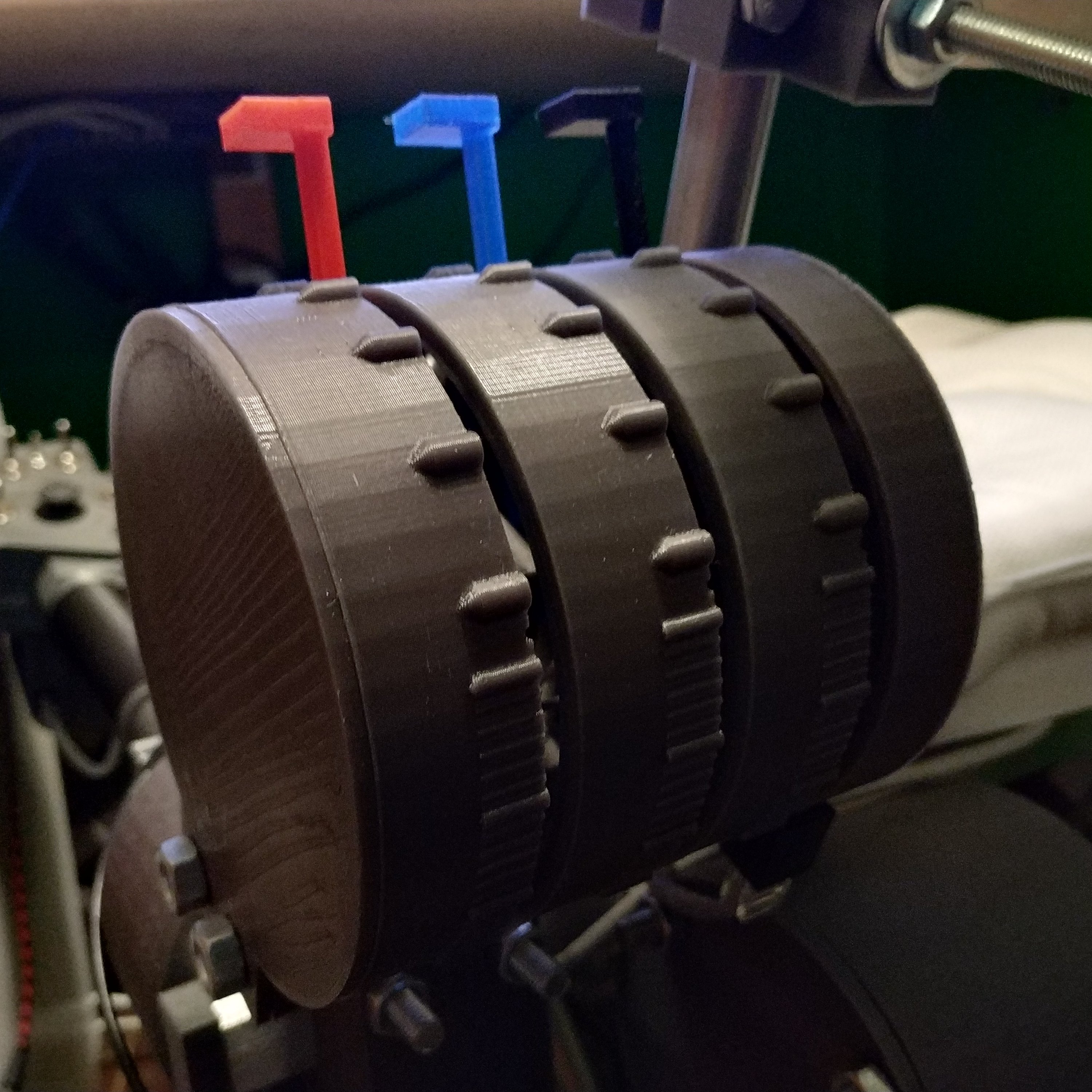
Here’s the MKIV stackable quadrant, the helicopter edition!
If you fly twin-engine stuff like MI-8, BK-117, etc – and also want to be able to fly warbirds sometimes – you’ll like the new quadrant!
The current, helicopter themed, version supports 2 axes with detents (for things like WEP and reverse in planes, implemented as button presses, because why not) – but you can stack as many of axis modules as you want. The default “GA” version that will soon be available will include 3 axes and trimmers.
This version is much more thought out than the MKIII one – so the latter will be outdated with its release. Each lever is equipped with a spring-loaded pull handle that allows movement past tactile detents on both ends of each axis and provides friction at the same time. Lever caps are fixed with screws – so you can change them to whatever design you like.
The first helicopter-themed version will come with spherical caps and no trimmers. I have just added support for it to the software.
Here’s my first attempt to film a complete short flight between airports for a demo of the hardware, and it hasn’t gone without some errors and weird maneuvers ofc lol (because 3rd take lol!), please excuse that =)
In the first part of the video, I show hardware up close, and then fly from 4S2 Ken Jenstedt to 35S Wasco state in XPlane 11 using KLICKITAT VOR for navigation, mainly to show the new radio panel of VRMaxII pedestal! =) You can also see how fun it is to fly with real VFR charts in PDF using Avitab plugin, rather than with a built-in map! Puts some extra workload on you during long (boring) straight flight legs =)
With a moving map, you only look out of the window because you’re bored. Without it, you have to constantly look for scenery highlights to check your position! I’d say try it, and you won’t regret!
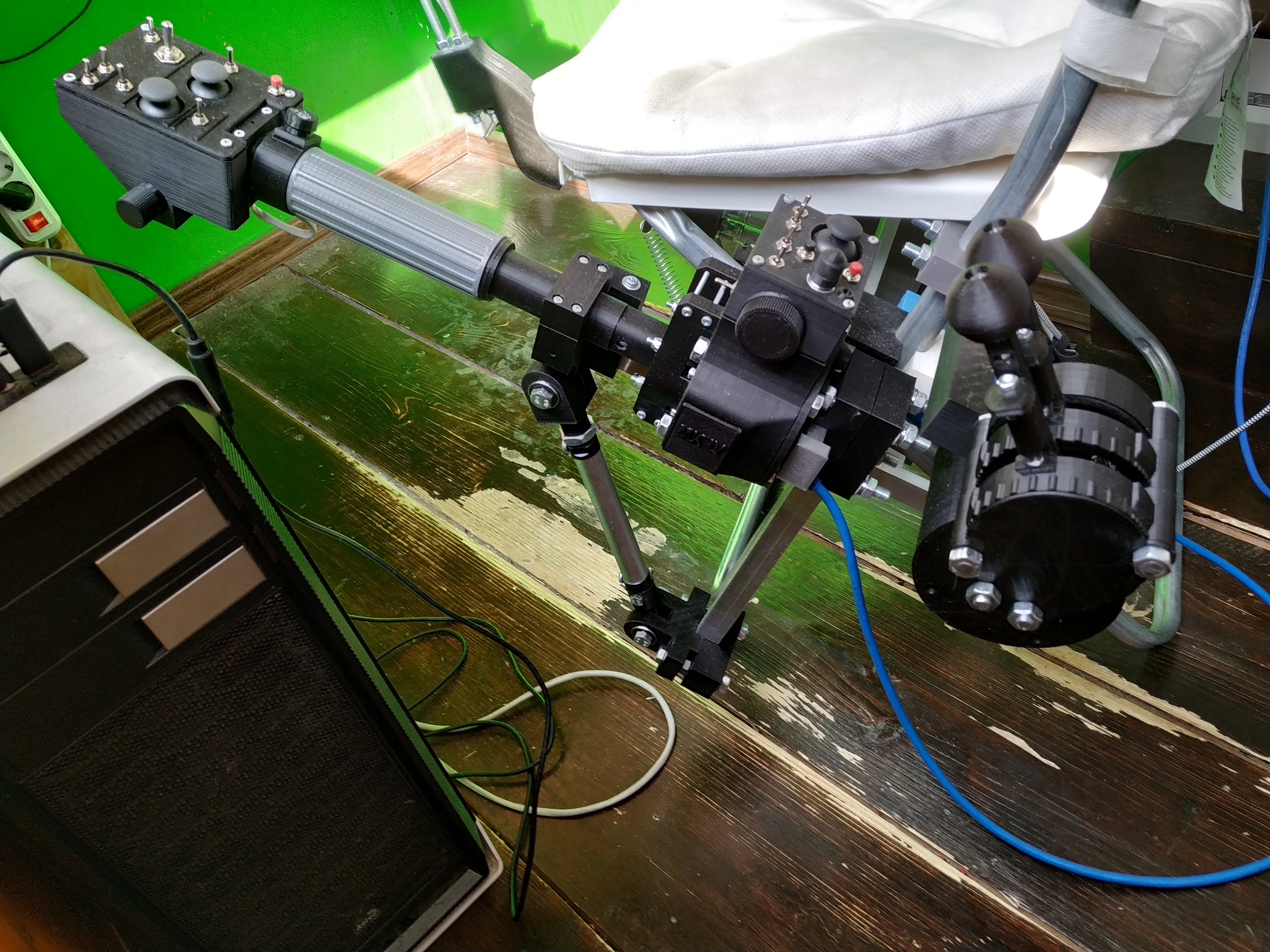
Somehow so far I haven’t talked about pedestals yet except for a brief introduction in a recent video, so let’s look at the latest updates =)
At the moment, there are two pedestal devices available: the simple pedestal, and the VRMax II one. These devices are actually very similar to each other, one being the more advanced version of another:
Simple pedestalVRMax II pedestal
One of these, in my opinion, is a must-have option for Simchair collective. Why? It allows you to use your left hand for operating switches, knobs, and other stuff in a helicopter, thus eliminating the need for letting go of your cyclic. When I first tried the simple pedestal, it felt like a major improvement to the flying experience.
I’ve been gathering feedback from the community for a while, and there were 2 popular opinions:
1 knob for everything is cool – you can’t cover all of them anyway
having more knobs is better – on some helicopters, there are knobs that are placed in a way that looking at those would still be distracting
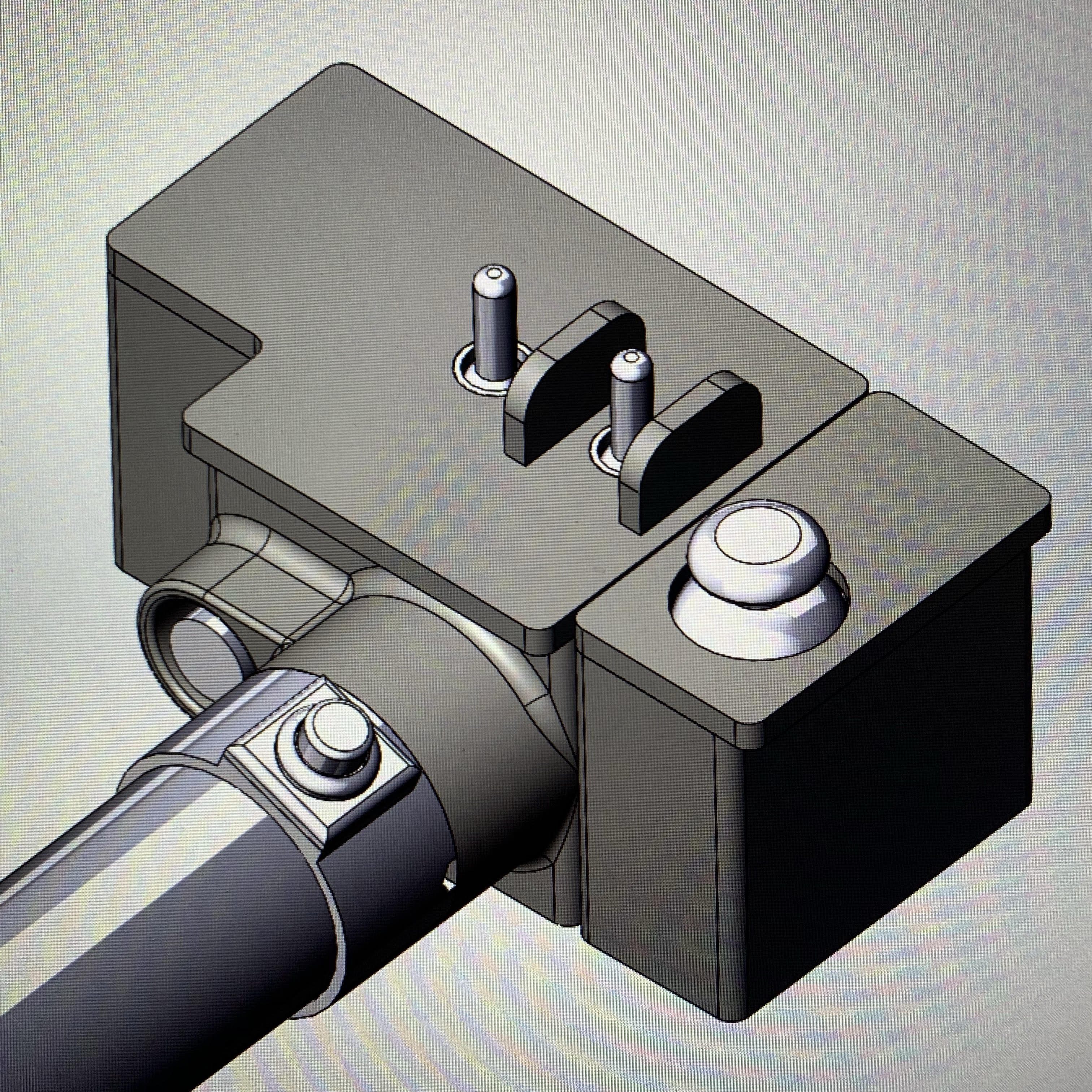
I, personally, liked the VRMax head and wanted to make something that will take its pros while dealing with its issues. So the VRMax II pedestal was born – which uses the straightforward and compact design of a simple pedestal while also adding the comfort of having 4 separate knobs for frequently used functions – and has a really nice rotary switch to map these knobs to 8 joystick button sets (of 10 buttons each – 2 per encoder + 2 green push buttons). An important thing is, it’s designed to be mounted onto the base of the lever, and that means, you can use it with a motion platform without worrying about its weight =)
Initially, I thought using a rotary switch might be confusing, but only until I mounted the device to the collective and tried selecting modes with it. The switch turns 3 clicks to the left and 4 clicks to the right, the shape of its knob can precisely tell you what position the switch is at now.
For the simple pedestal, its assembly manual, software, and model files are available, for the VRMax II one, radio panel firmware is in development at the moment. It’s model files, however, are already available in simchair4_models repo on GitHub.
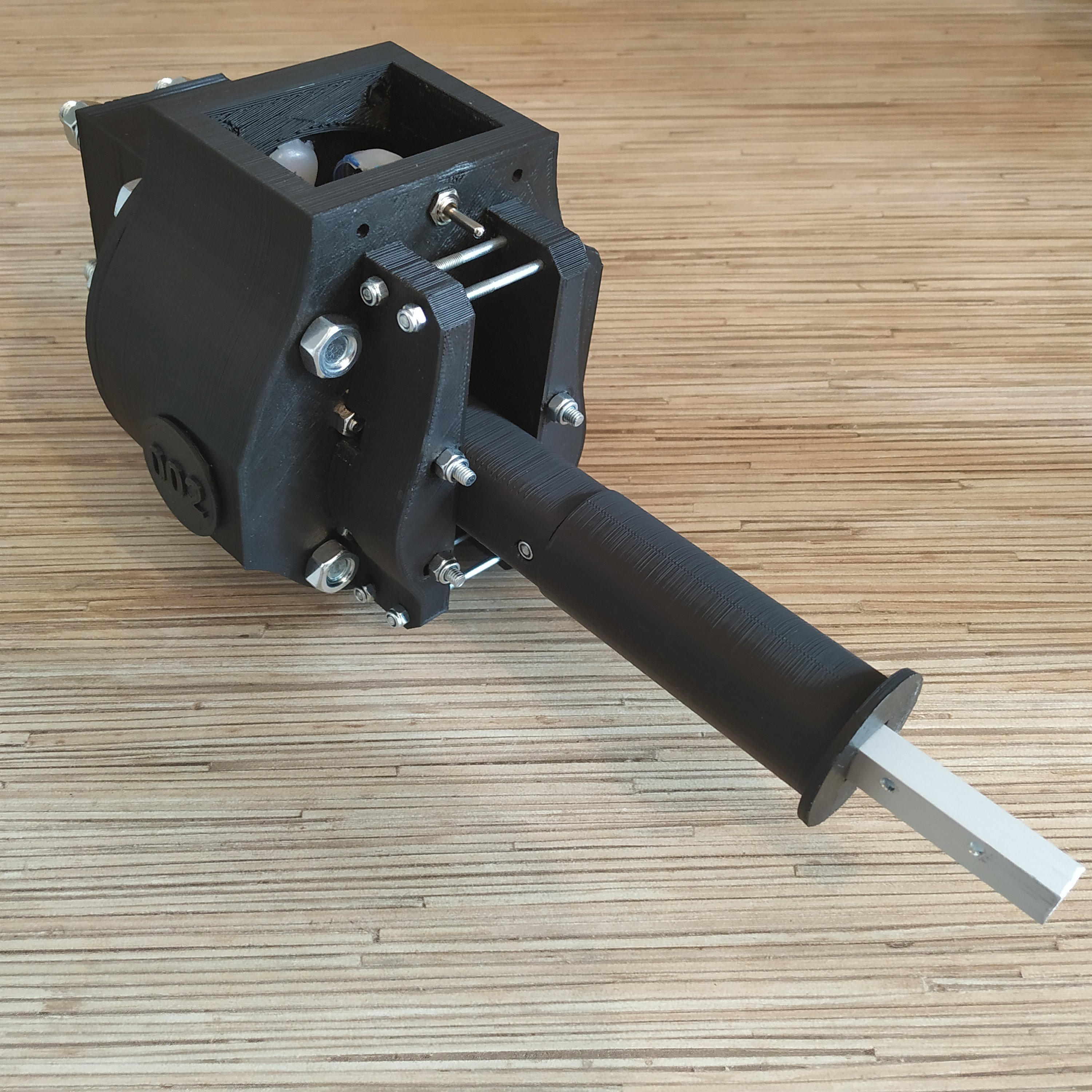
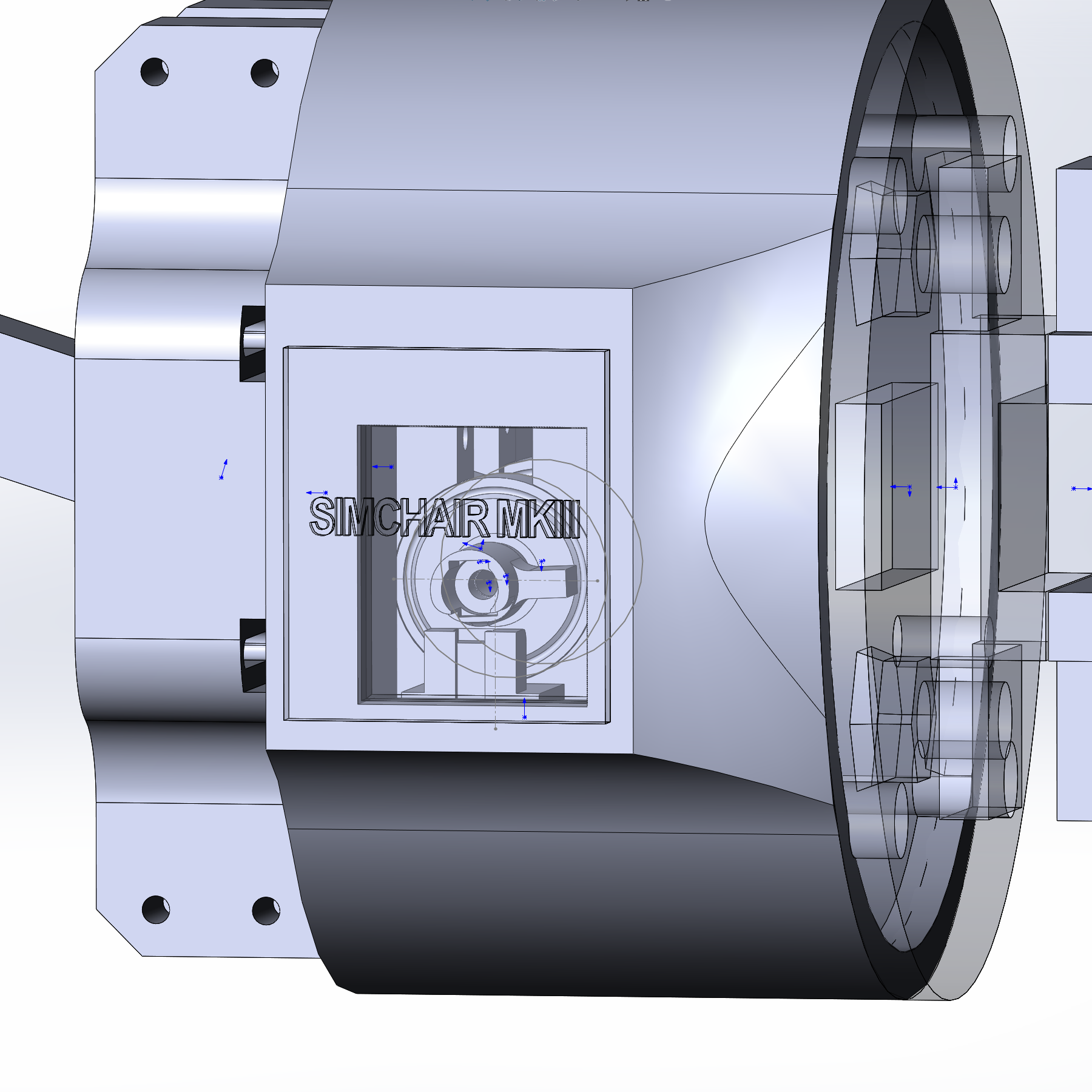
I am glad to announce the completion of the 1st manual of Simchair MKIV line. The new line of hardware will take a Linux-like approach – we will have separate compatible modules that can be connected together to form a lever of choice.
The new base is epic, so from now on, the MKIII one is obsolete =) It is fully compatible with all MKIII lever bodies, and you can safely use it with those if you’re building the lever right now.
The first lever body to be released will be the compact collective – a motion-platform ready compact solution with integrated head. An interesting thing about it is that it supports the pneumatic mod, but does not require it! Also, it doesn’t need the counterweight, and that’s important with all lateral loads and shake that can be present when using the lever with motion platforms.
STL’s and sources can be downloaded from the new simchair4_models repo.
I continued experimenting with white paint marker and acetone and made a “scale” version of a top panel for a 412-style head requested by a friend. In my humble opinion, it looks great, white paint adds some “aging”, and it looks more like it was taken off from a real helicopter. It differs from the original slightly, but has a disctinctly recognizable look overall!
A really small update for the latest physical throttle latch mod. A fellow 206 pilot pointed out that the shape (and the color!) of the button was not realistic!
So who am I to argue with a pilot, here’s the new one 😀
I have filled letters with white paint marker ink, then wiped the surface of the button with a cotton pad wetted in acetone. The button was then glued to the shameful “unrealistic” one with cyanoacrylate =)
The cap is already in the repo if you like it (I do, it really looks much better) 😉
I have been working on the 206-style collective lately, and here’s what it looks like so far:
A few notes about it:
it works!
it will be released as a mod to the single throttle lever.
it uses 3 parts (one of which is an assembly of 3 small parts itself) that are different from the original lever, so any existing single throttle lever can be modified without too much effort
1st test video showing an assembled lever will probably be released on this weekend =)
I have also added a mod (part 1 and part 2) for the collective housing that allows access to the magnet from the left side of the lever:
And look at this really great 407 head design sketch by Connor P. Bourque (I hope you don’t mind me posting it for everyone to see mate)!
Hopefully, I will be able to assemble and try the lever on this weekend.
I have added a very detailed step-by-step manual for the collective pneumatic mod. Some minor improvements were made.
I’ve been able to test the twin collective with it, works flawlessly
MAL-16-100 cylinder has been tested, and it works as good as the MAL-16-150 one, but is shorter (this is the shortest one that will work, MAL-16-50 is incompatible!)
some minor tweaks has been made to the software configuration to fit new manuals.
the helicopter controls set is now completely documented (and very polished)!
We now have quite a detailed documentation with photos for:
single and twin collective levers;
collective heads (switch panels);
reinforced cyclic gimbal with its stick frame;
B8 stick grip;
pedals.
I have accidentally noticed yesterday that I’ve actually forgotten to add a throttle quadrant page after I finished working on it and built a prototype!
This is now fixed, and the quadrant finally has its own page with a humble description. Consisting of only 4 different (stackable) parts, the thing is probably the easiest one to make, so doesn’t require much of a manual to assemble mechanically. Regarding the software, its current version supports 3 main axes and 3 secondary (reverse or smth) axes, and can be easily changed to support 6 main axes. If you need more and are in doubt about how to do it, please feel free to contact me, I will advise the best way to tailor the software to your needs. This quadrant design can be used to drive any axes number, so you can fly pretty much anything from a Cessna 182 to a B52 with it! =)