I decided that maybe it’s a good time to update my lever, which was an early version of the MKIII base with a rubber bands mount, to the most recent MKIV EVO version of the lever, partly because I finally found a fair VR configuration for XPlane and thought having a pedestal would be nice, and partly – because the new base has 2 mode switches, and I wanted to test the 2nd one in everyday use and maybe find and fix some related issues. When I finished the build and started looking for the peripheral firmware to flash it, I suddenly understood that there isn’t one.
So, I was quite happy to fix that problem and added some code to support the I2C version of the Simple Collective SE lever (which is actually one of my favorites because of its compact size and rich functionality).
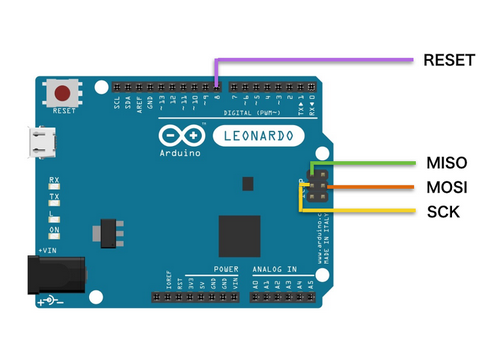
Also, I noticed that the wiring is slightly different from the USB version due to some minor differences in Pro Mini and Pro Micro pinouts, so the manual will follow shortly!
As always, you can find updated files in the simchair4_software repo on GitHub.
Cheers!