
It probably needs some editing but is quite detailed where I think it’s important and should be helpful when building a new gimbal.
Strengthened gimbal first flight impressions
I have finally managed to build the gimbal, and even tried flying with it on Aerobatics Online Caucasus sever in DCS =)
I can say it’s great! For now, I’ve used rubber bands for stick centering, and they work pretty well. I noticed that I haven’t been using the software force trim function much during this flight. A lot of heli pilots were online, so I’ve had a great opportunity to put both the gimbal and pneumatic mod for the collective to a good test 😀
I am waiting for 50mm MAL16-50 pneumatic cylinders to arrive, hopefully with them installed the stick will feel perfect. The collective pneumatic mod still holds together, I am beginning to think it’s really safe to use. A couple more weeks will show if I am wrong =) The new gimbal will be released tomorrow, if time permits, I will also be making a couple of videos about the new stuff soon.
Stay tuned!


Thoughts on MLX90333
After finally getting some long enough sleep I thought again on my failed attempts with a Melexis sensor. The sensor itself is quite precise and has some DSP onboard, so I tried it again with a spherical gimbal and noticed that depending on how close a magnet is to the sensor, it outputs not a circle, but a square, inclined to 45 degrees. I thought, “- what if I simply cut excess values and make it a square?”, and did just that. The idea behind it was that jitter of the point in a joystick tester sketch seemed minimal, so the physical precision of the sensor looked like being enough to work well. As long as we have a 15 bit external ADC that powers our gimbal, we should still have something like 4096 points per axis even with this reduced range, which is plenty.
Now, if we use a disk magnet instead of a square one, unarrested twist axis is not an issue anymore, it doesn’t affect X and Y positions in a big way. So this design seems to be perfectly fine for vertical sticks, or sidesticks, and I think with a pneumatic mod it can be as good for everything else. Its beauty lies in its mechanical simplicity, only a few parts are needed, it can be quite small in size.
I think I will make, test and publish both versions so everyone will be able to choose something for himself =) There’s also a third version, the 608 and MLX based one, its fate will depend on a degree of success of the spherical bearing based one =)
Meanwhile, some progress on the 608 and SS495A based version:

News on a strengthened gimbal
I’ve printed and assembled both versions I was talking about in the previous post, and sadly, I had to revert to using SS495A sensors. That’s because the MLX sensor is not so good at displaying values at the angles of the square, like x:1000,y:1000 or x:10,y:10. It also has quite a high jitter near edges of axes. If someone has some experience with these MLX sensors (I am probably doing smth wrong) plz share it with me =)
Meanwhile, I’ve redesigned the new gimbal for use with trusty old SS495A sensors. I am pretty sure it still needs some adjustments, but it uses the same distance from sensor to the magnet, and same 6x6x4 magnets (5x5x5 mod will be available as usual) as well, so I think we will see it in action soon enough.
Here’s how it looks:
Thoughts on strenthened flight stick gimbals
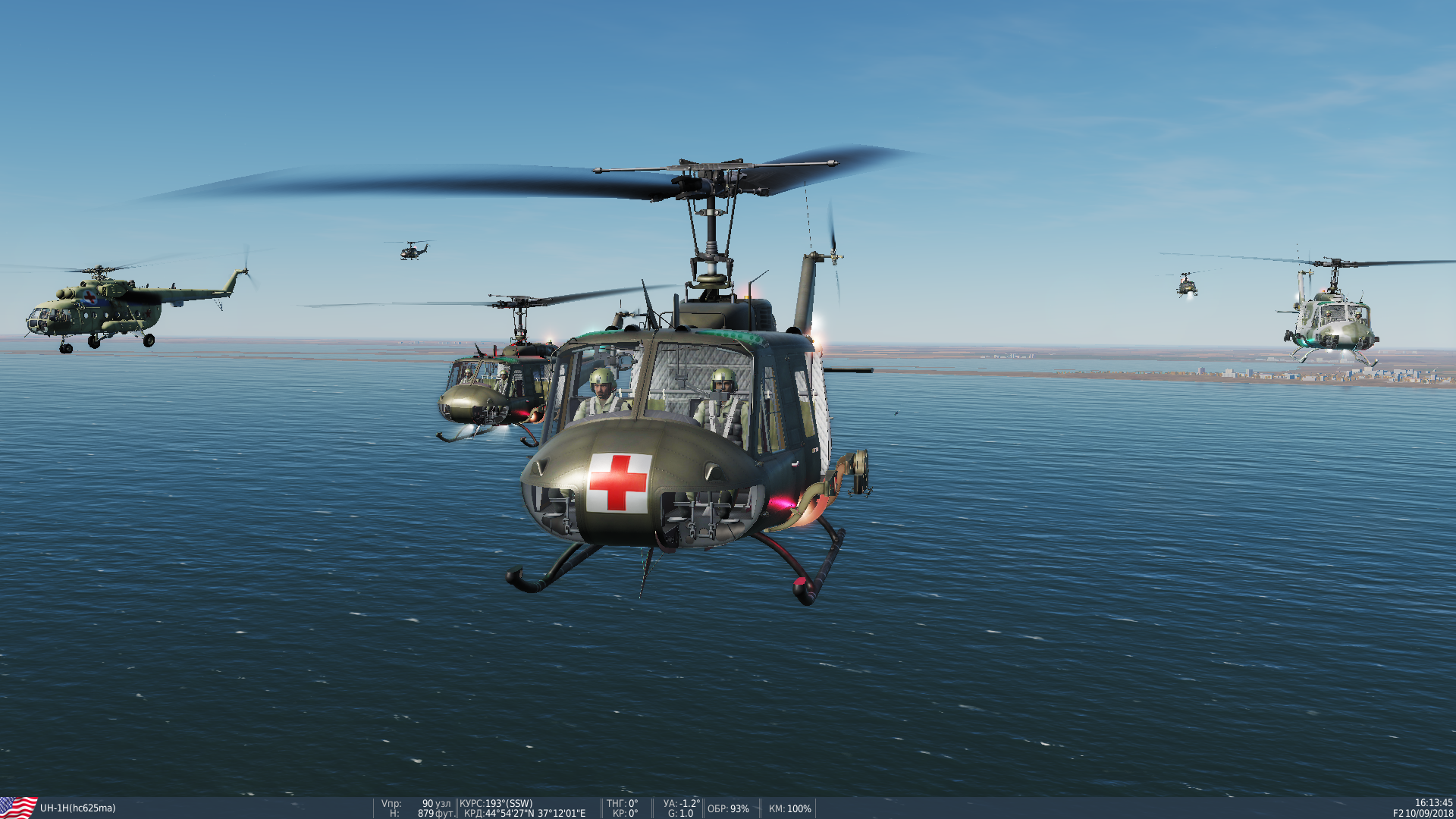
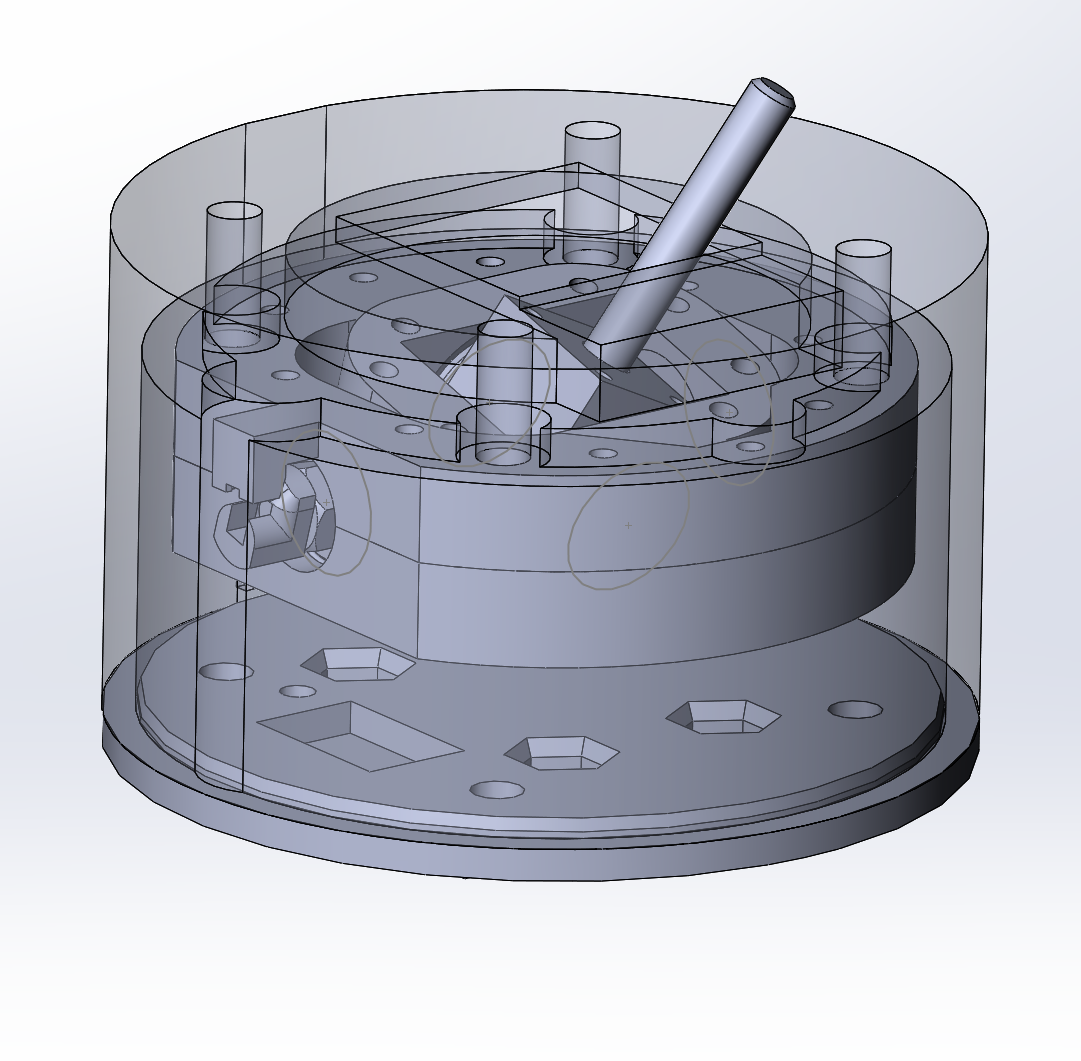
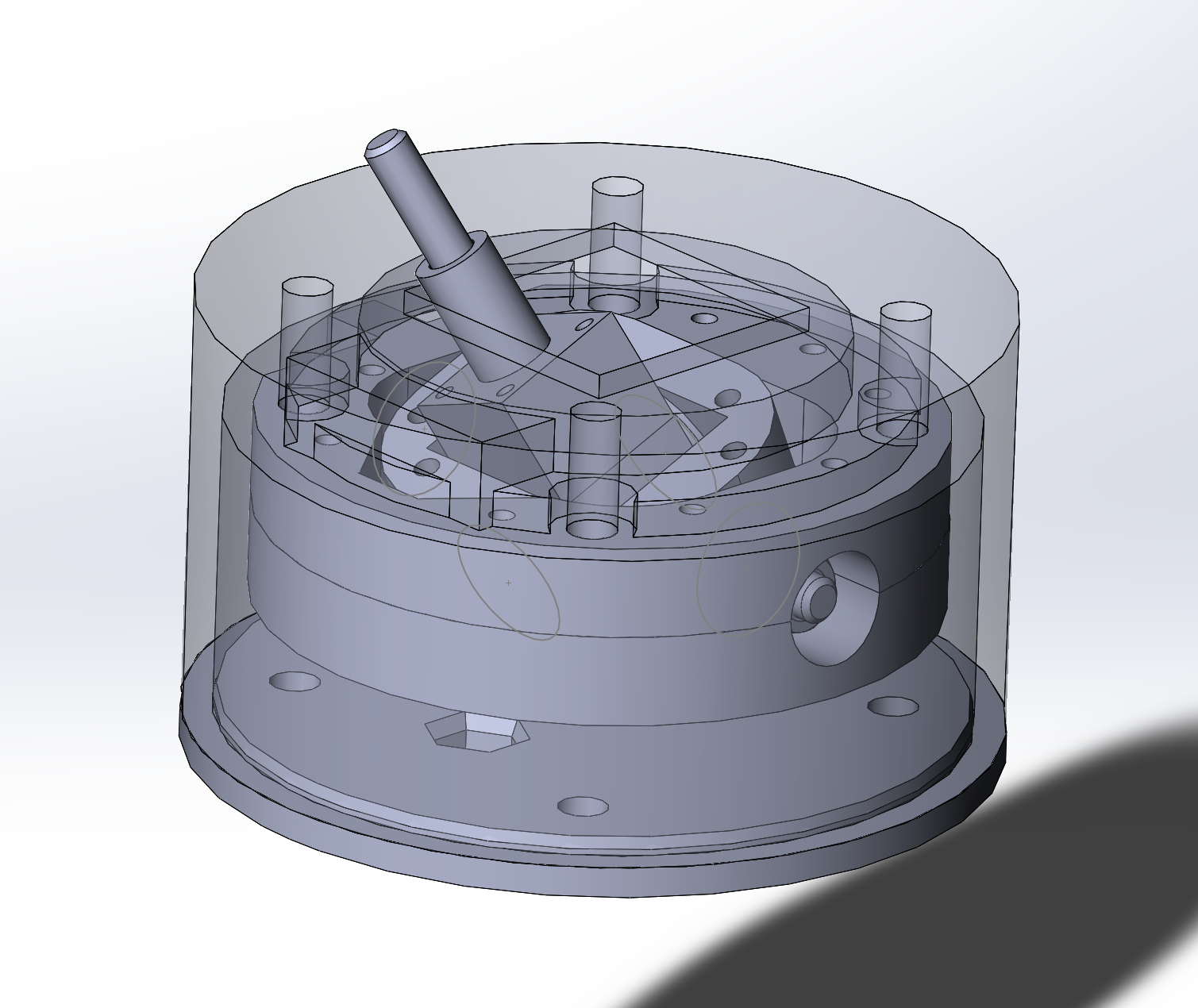
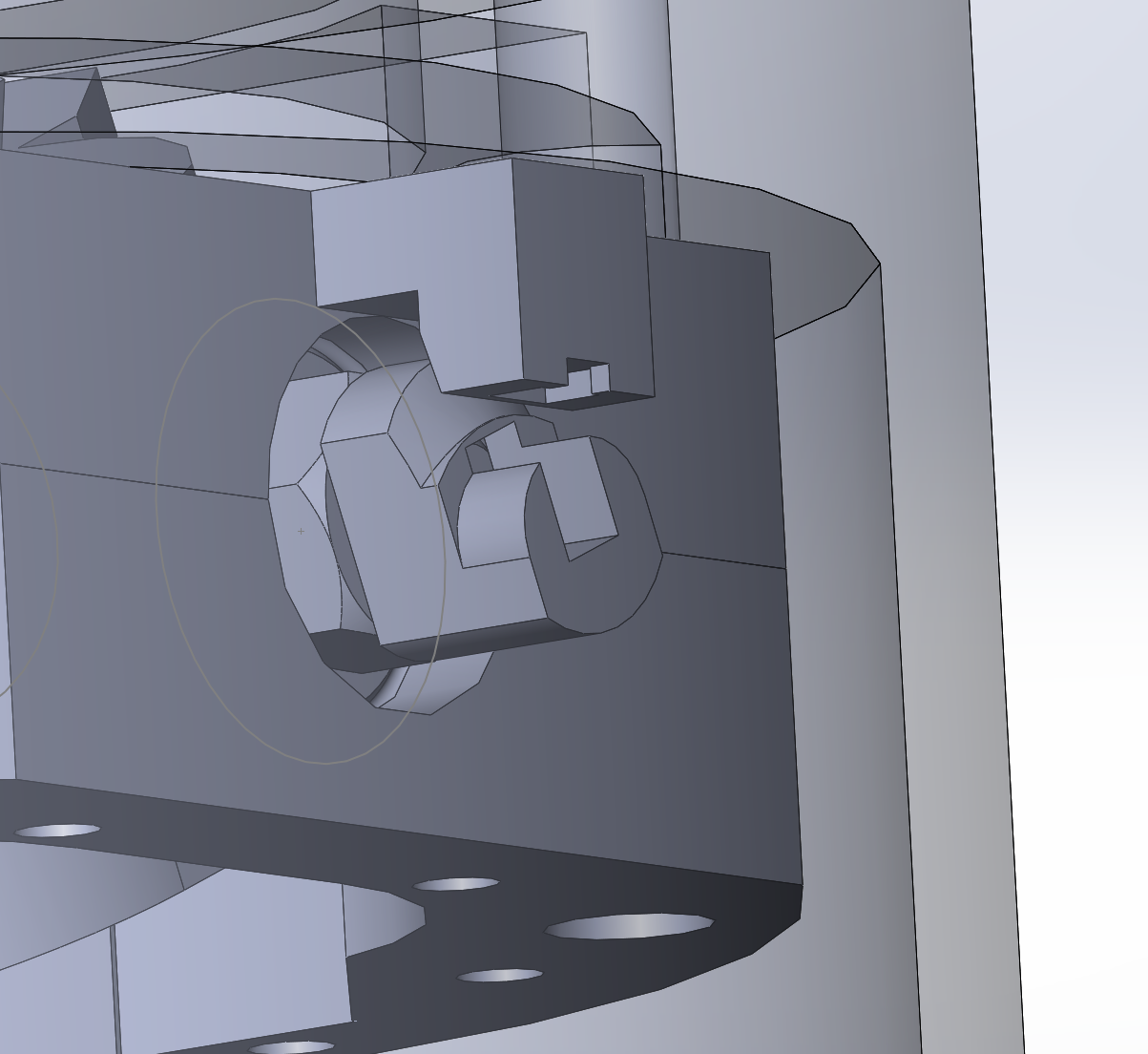
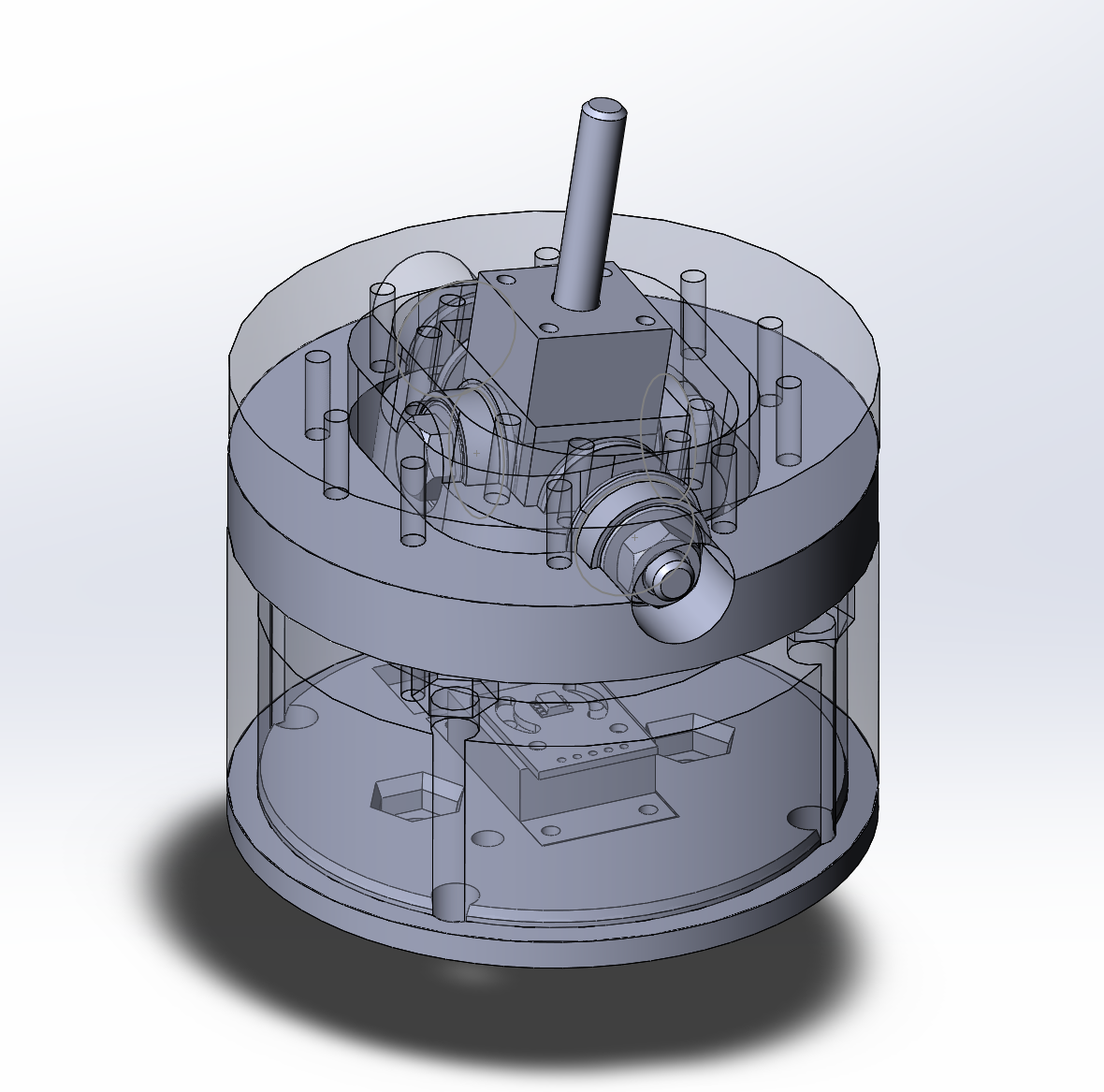
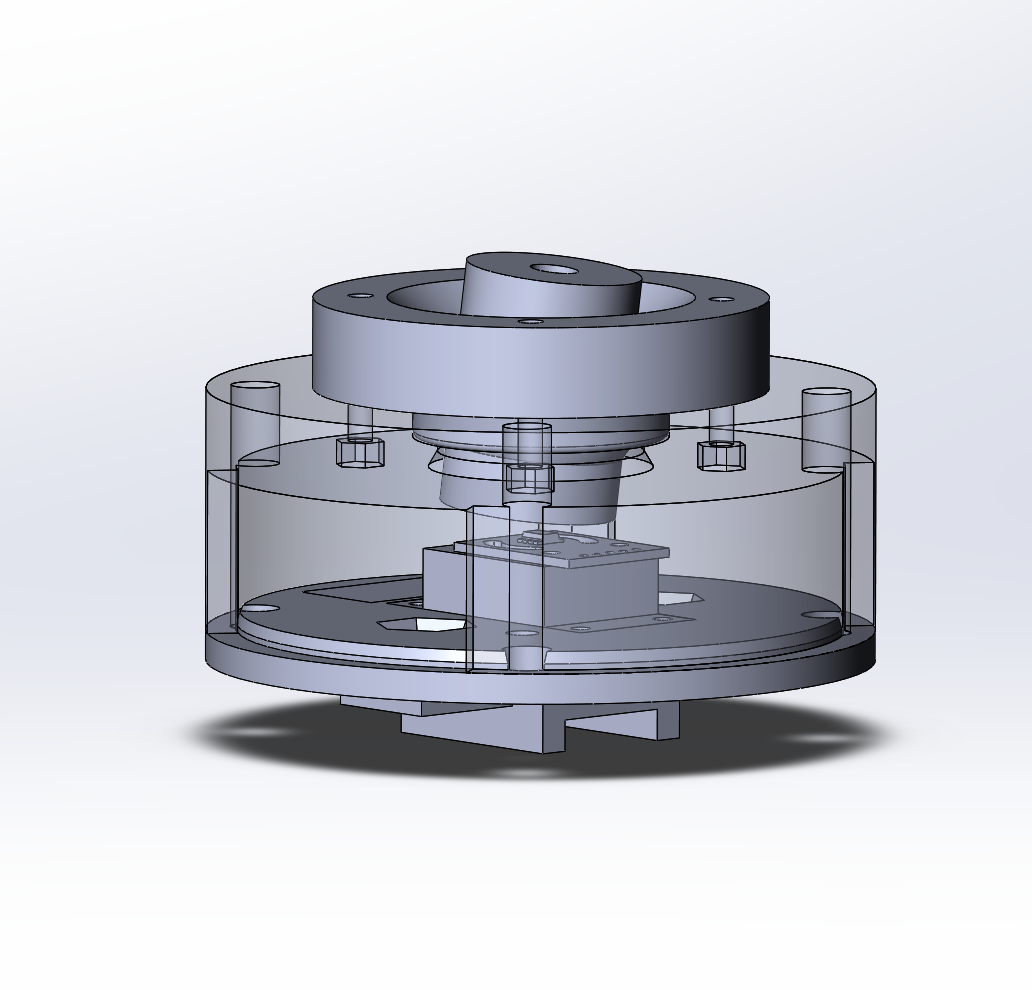
I am now working on two reinforced gimbal variants. One of them is based on an ordinary 608 skateboard bearings, another one – GE25 ES-2RS spherical bearing. Both of them will be able to handle springs, rubber bands, pneumatic cylinders, etc. A CJMCU-93 module (MLX90333) is used as a magnetic field sensor.
The fate of GE25 ES-2RS one depends on whether I will be able to prevent it from twisting or not (i have an idea involving _| shaped bracket, 2 pneumatic cylinders, and 2 spherical heads now). If you have some ideas about how to lock “twist axis” of a spherical bearing, please share them in comments =) Here are some pictures of the GE25 testbed and 608-based design.
Gimbal magnet holder mod for 5x5mm magnets
There seems to be a problem with finding 6x6mm magnets, so here’s the mod for 5x5mm ones! The problem is, I can’t buy them locally, and they will probably take some time to arrive, so there’s no way I can test the holder. I think it should work fine, as all gimbals now have mechanical calibration. The resulting travel angle of the lever may differ a bit, but that difference shouldn’t be too noticeable. There are two versions: one with 5x5mm socket in an original place, and the other with a slight offset (closer to the sensor) from center. Choose whatever suits best for you!
Download it here.
Cheers!