Finally, after quite a long process of designing new things and upgrading old, I can relax for a while and fly to my heart’s content: stuff needs testing. I try to fly every evening, sometimes in DCS, sometimes – in X-Plane. I like both of them: DCS for the Huey, which feels alive, X-Plane for Ortho4XP, VATSIM and the opportunity to fly around the world.
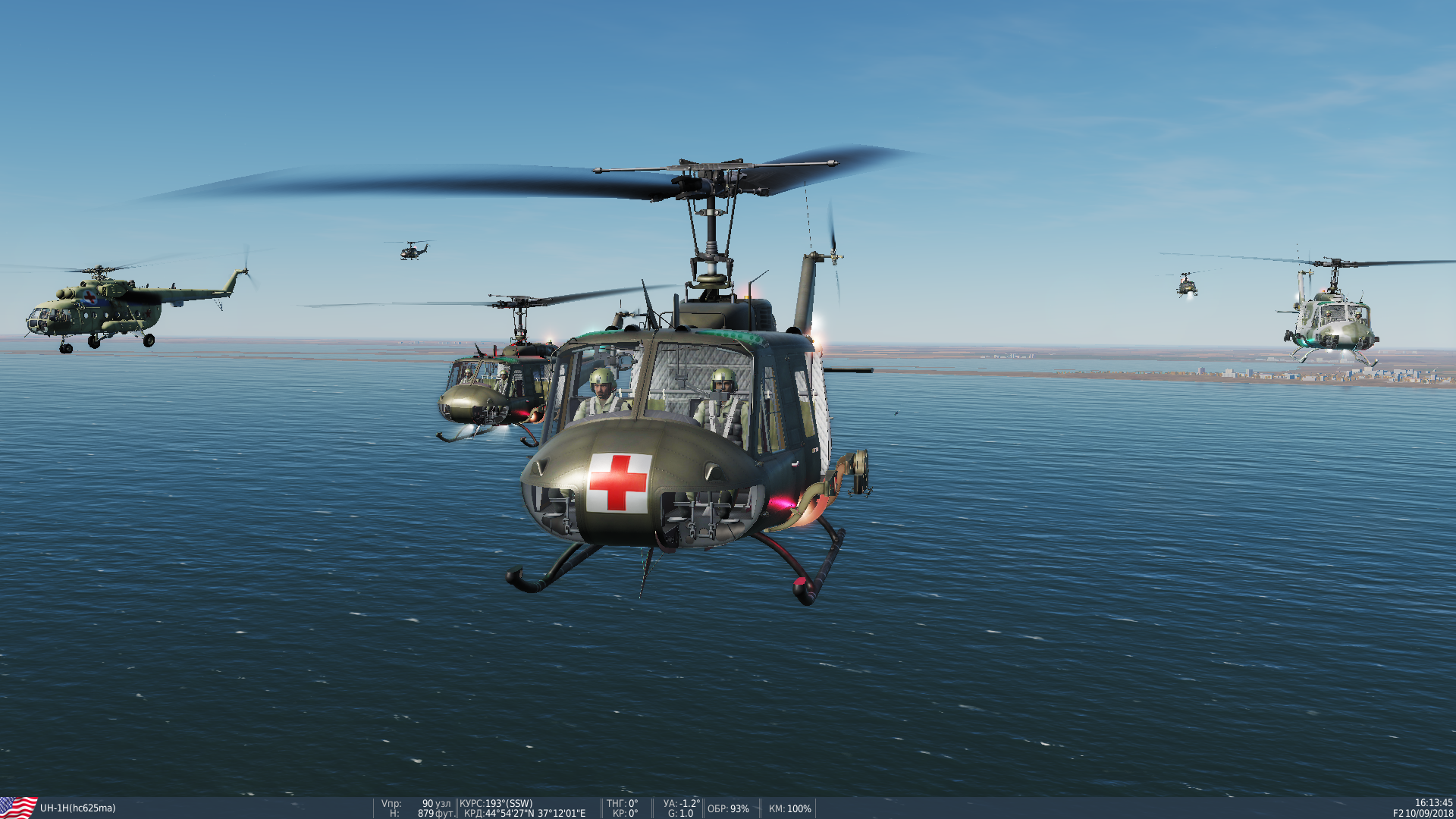
Sometimes it’s a bit hard to go from DCS to X-Plane and fly perfectly: the way these sims handle controls input feels very different. Usually, I try new hardware in DCS at first, because its flight model is better. I have been flying there for a while lately, even had a chance to lead a large enough formation, and could say nothing bad about the new gimbal.
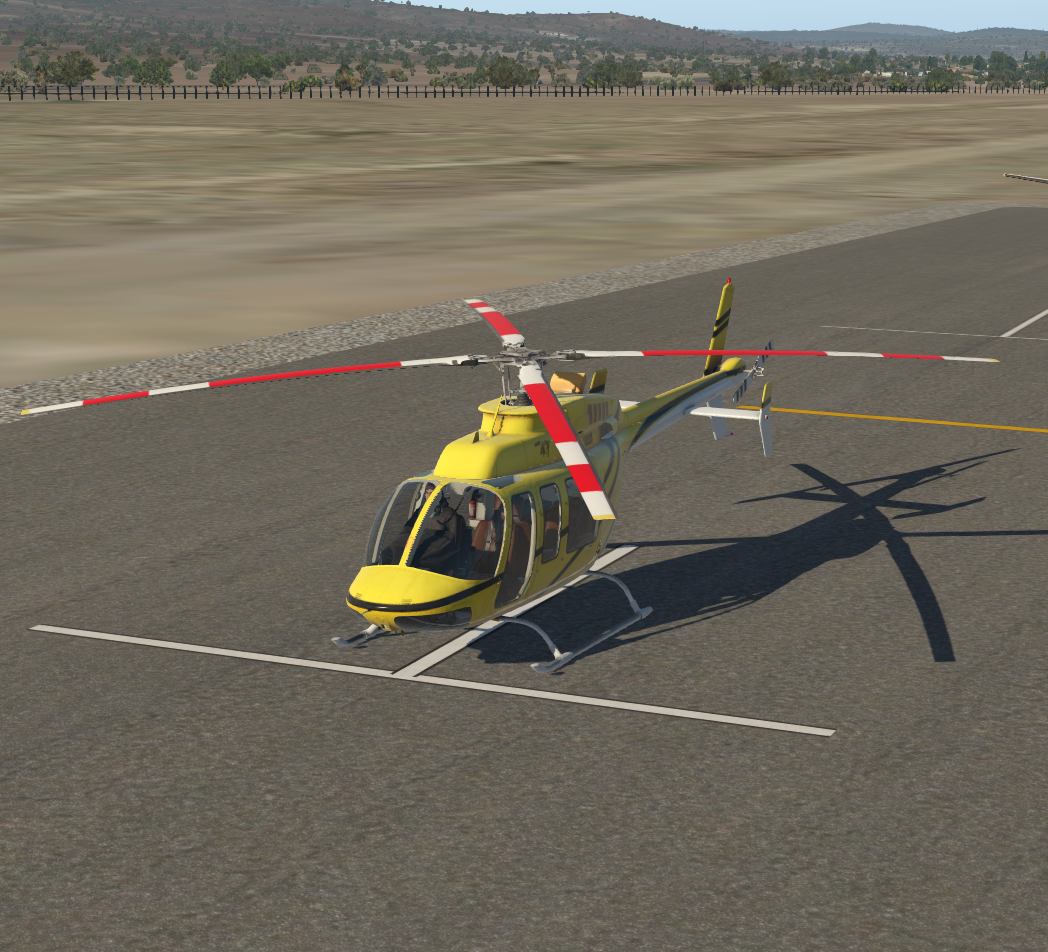
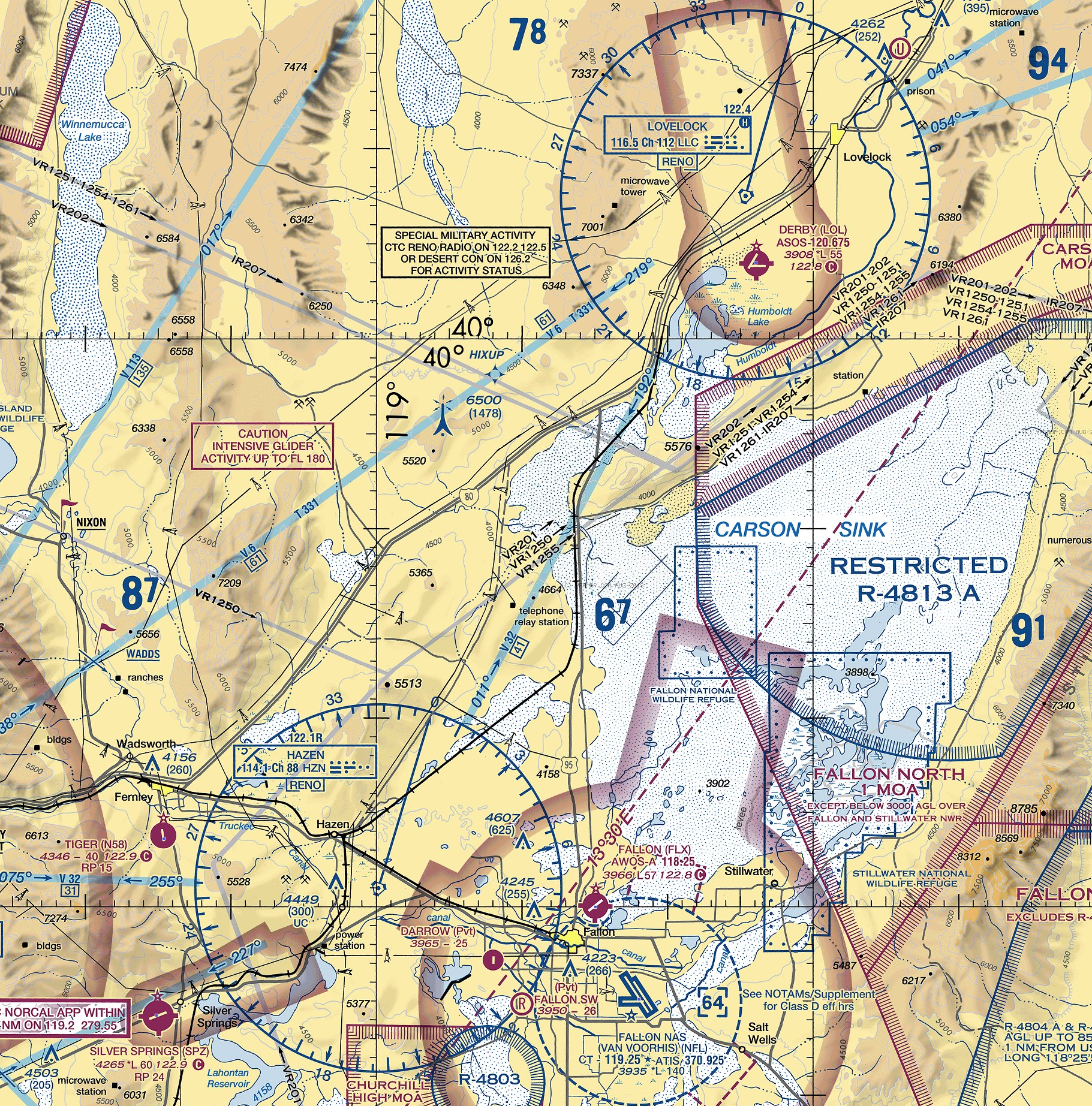
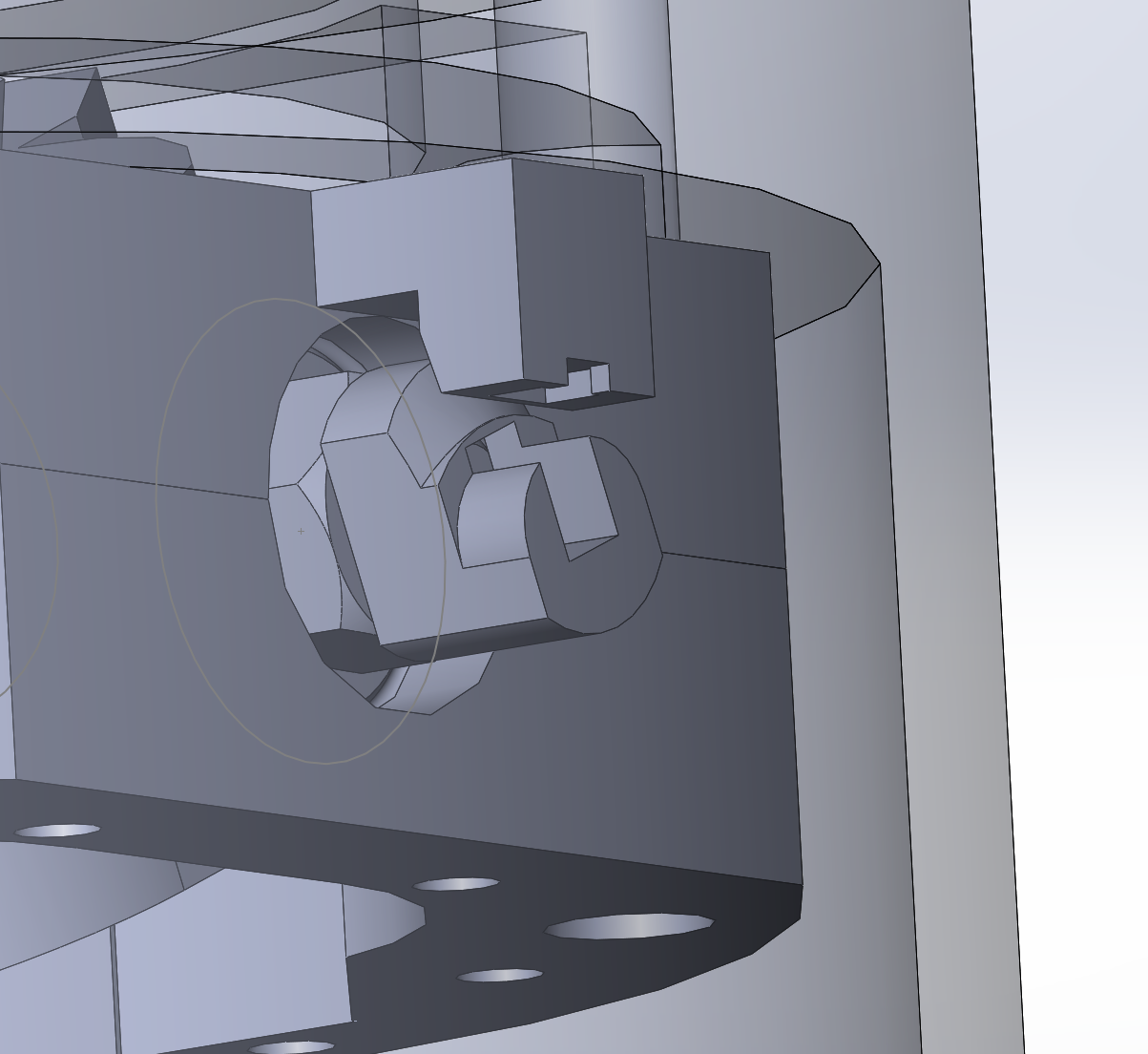
Today I decided to go on with my X-Plane journey across the US West in a 407, doing a short Derby (KLOL) – Silver Springs (KSPZ) leg of the route. After getting used to more sensitive controls response of the 407, the flight has been a pure joy. I have started the flight with 80% sensitivity mode enabled but quickly switched to 100%. The gimbal allowed for slightest adjustments to be made with cyclic. This time I used force trim function in flight a few times, to hold the stick while I’ve been looking at the map, and to try 407 specific “electric” cyclic movements with a hat switch. With rubber bands now present on the gimbal, it holds and centers cyclic stick quite well, now I use force trim mode on the ground only when I need to remove cyclic stick to go pour myself some tea =)
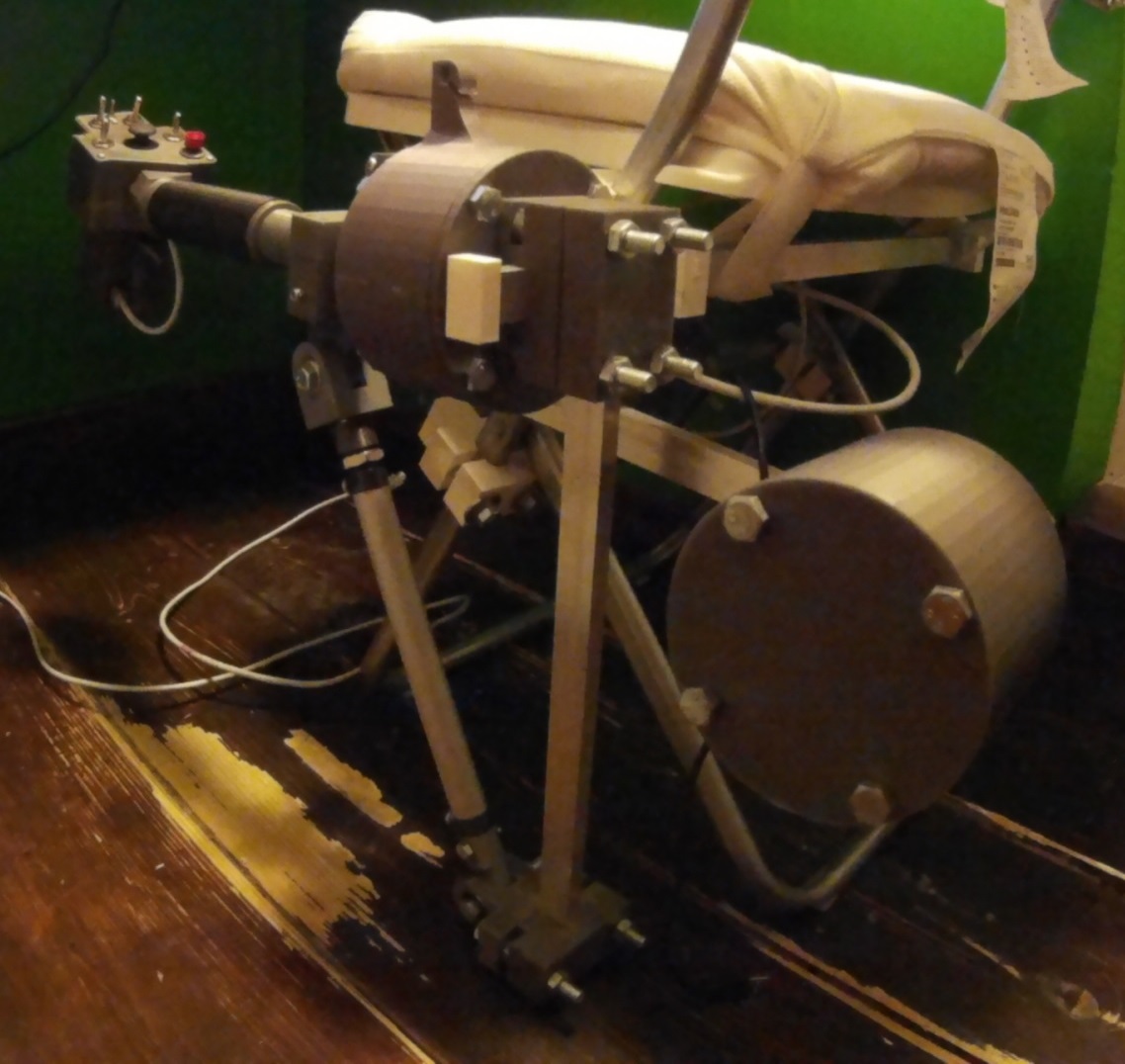
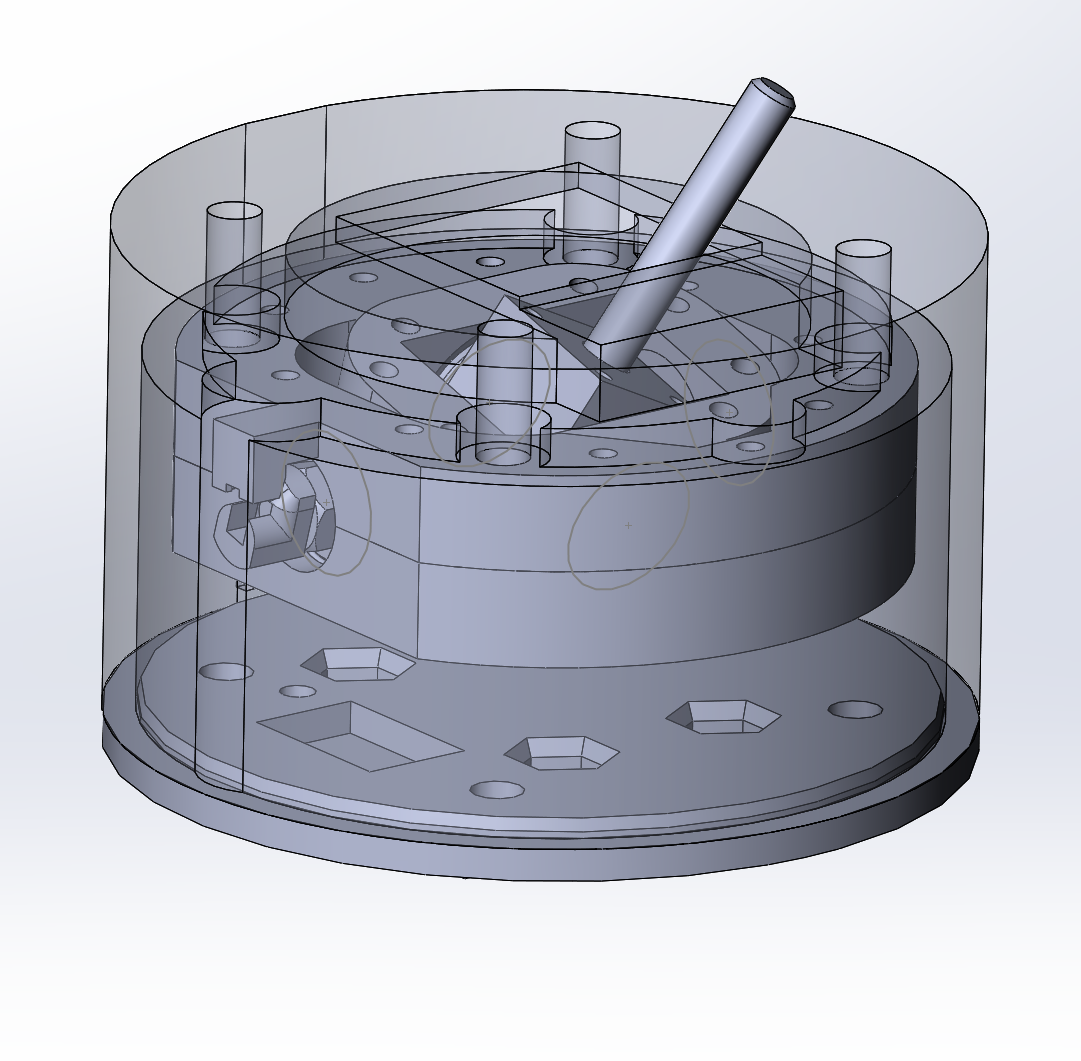
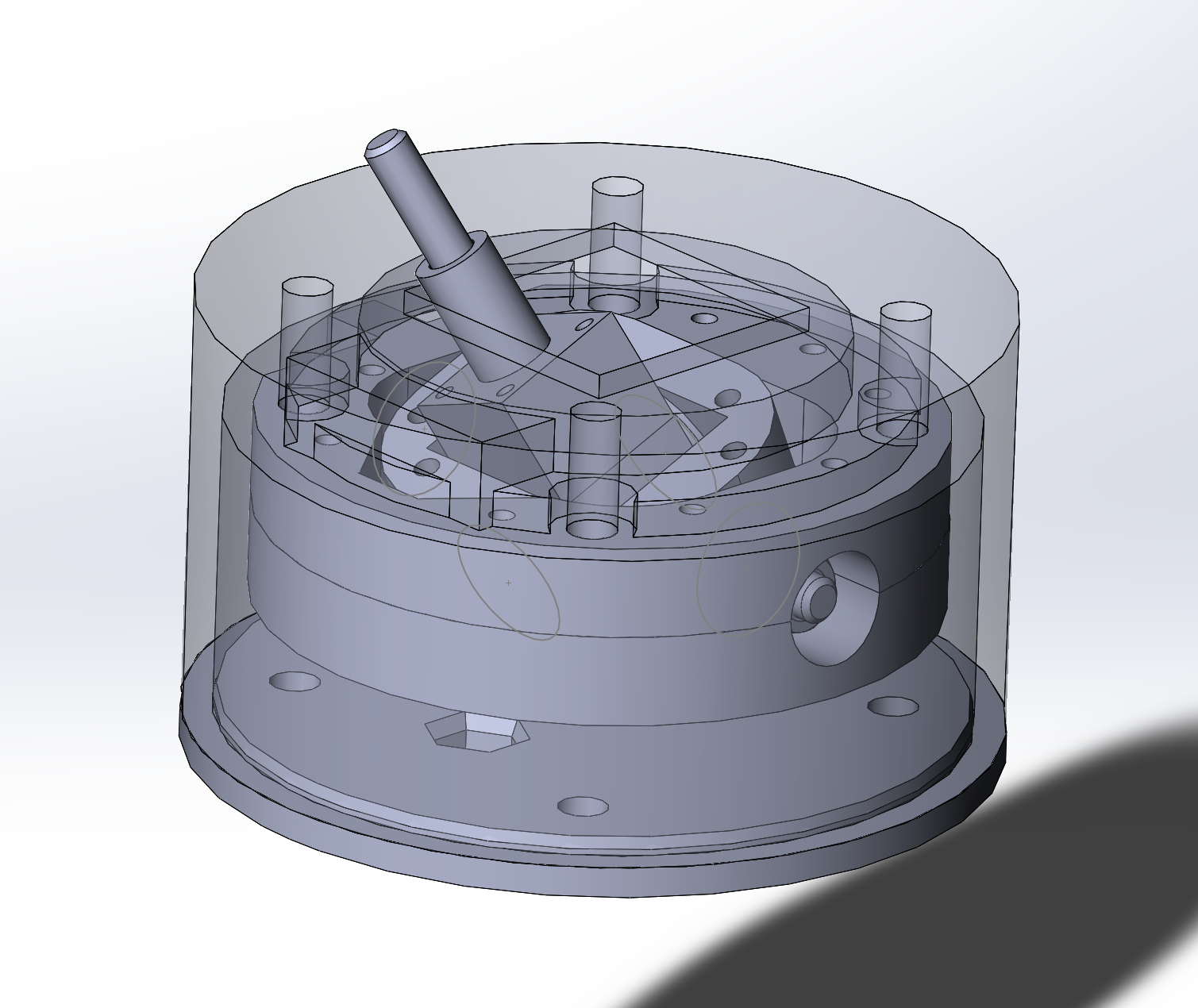
So far the gimbal feels perfect. It’s very precise, maybe because of a stronger mechanics, there seems to be no backlash at all. The collective with a pneumatic mod still holds together and feels great as well. I tried adding a few drops of bicycle chain oil to the tensioner, this way it can strengthen the assembly, yet not affect smoothness of travel.
Overall the whole set is very precise and smooth, probably leaving nothing more to wish for, except maybe pneumatic mods for cyclic and pedals =)