
I have just finished building the 1st MKIV collective base, and can say it’s great!
Not only its much stronger and more precise, but has a built-in mode switch that can be used for various functions in the software, 2 Ethernet sockets instead of a cable with a plug, and can be flashed through any of these sockets – with any USB-UART board! For cheaper boards without the DTR pin it has an MCU RESET button, that allows it to be flashed with manual reset in the process with stuff like PL2303 (which I no longer recommend using, just buy an FT232TL based board which is roughly the same price but installs drivers for itself and resets ProMinis automatically).
I actually liked ” live ” flashing and calibration more than I thought I would. The lever body itself is the first one intended to work with motion platforms – it’s strong yet lightweight, so lateral loads should not be a problem for it. The head also features the same set of buttons as the Huey-style head – but can be operated without the pneumatic mod.
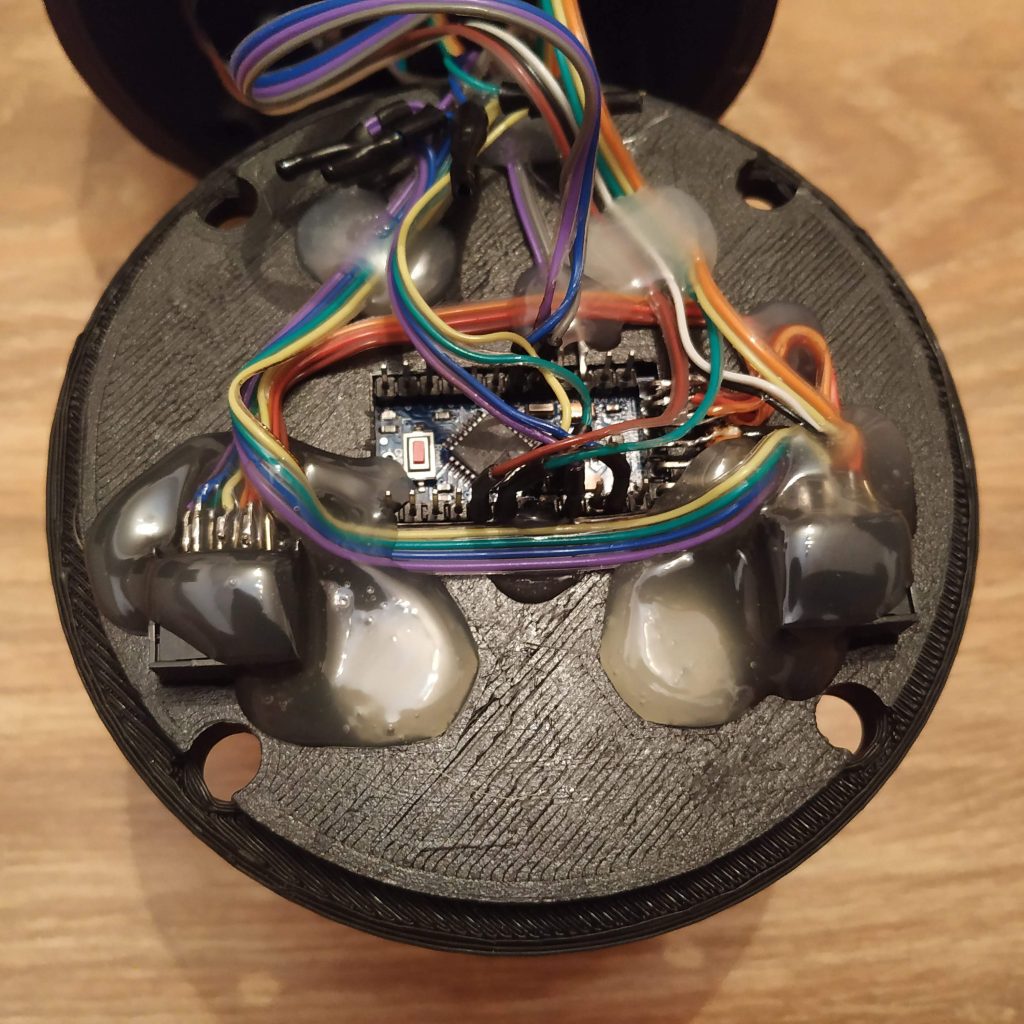
Now, let’s look at what has changed. The new base has its Pro Mini connected in the following way:
- Mode switch left pin -> Pro Mini pin 2
- Mode switch GND -> GND next to RST
- Mode switch right pin -> Pro Mini pin 3
- MCU RST button -> between RST and GND next to it
- SS495A1 pin 1 -> THR POT left pin (on the left when the lever is mounted as usual) VCC cable tie <- Pro Mini VCC <- Ethernet sockets pin 1
- SS495A1 pin 2 -> THR POT right pin -> GND cable tie <- Pro Mini GND <- Ethernet sockets pin 2
- A0 -> SS495A1 signal
- A1 -> THR POT signal
- A4 -> SDA cable tie <- Ethernet sockets pin 3
- A5 -> SCL cable tie <- Ethernet sockets pin 4
- Collective head I2C cable -> VCC, GND, SCL,SDA cable ties
- Pro Mini Rx -> Ethernet sockets pin 5
- Pro Mini Tx -> Ethernet sockets pin 6
- Pro Mini DTR -> Ethernet sockets pin 7
What is the print volume required for this project? Looking at getting an Ender 3 and was wondering if that was suitable.
Hi!
I am using a humble P3Steel with smth like 200x180x160 useful volume. Ender 3 has a larger print bed, so should be fine! Also, it seems to be popular – and I know at least 2 people who use it for printing Simchair.
Should work great =)
The only thing- check if 0,3mm nozzle can be installed if you want to print fancier stuff, like switch panels with letters. For other things 0,4mm is fine.