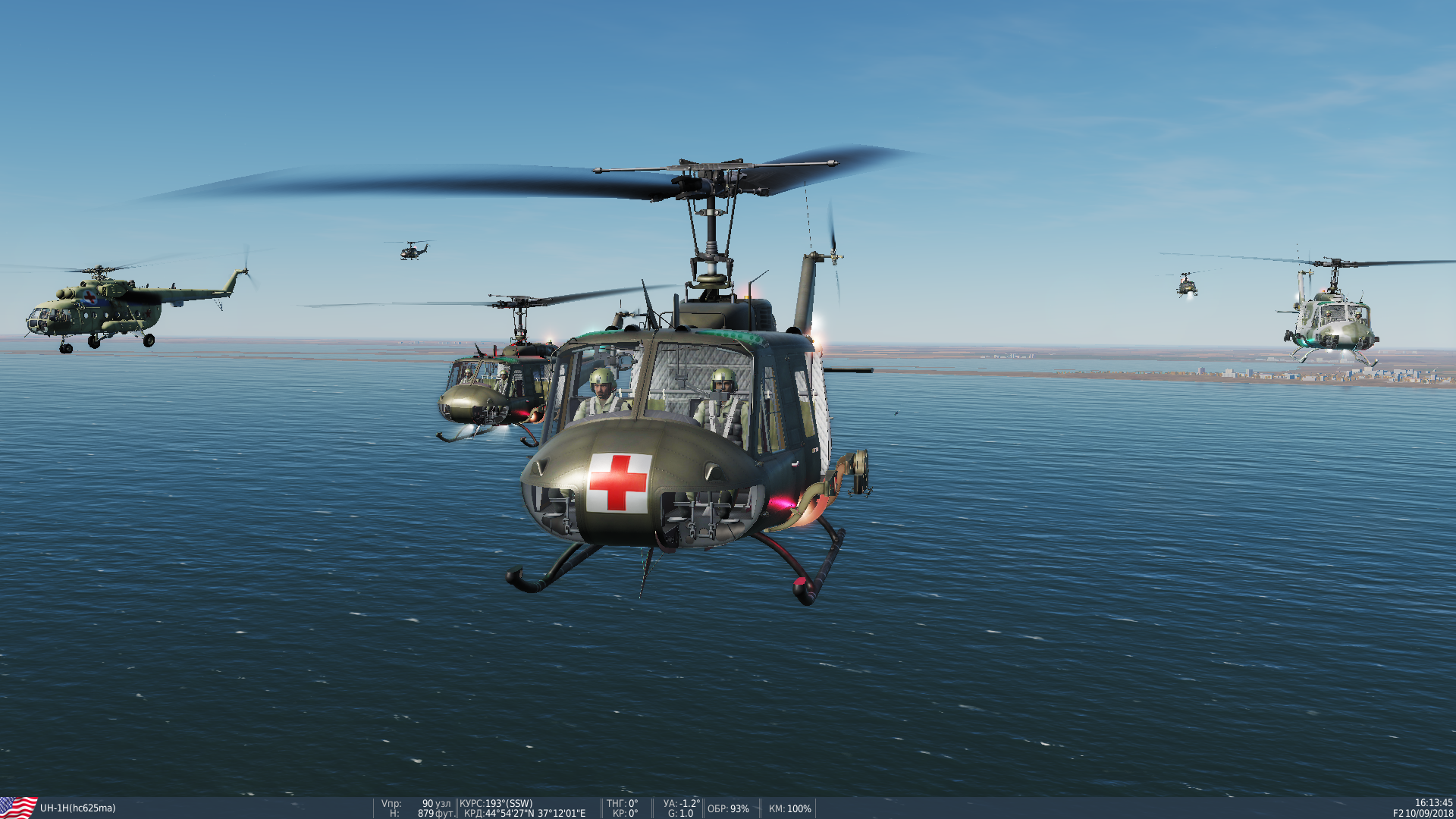
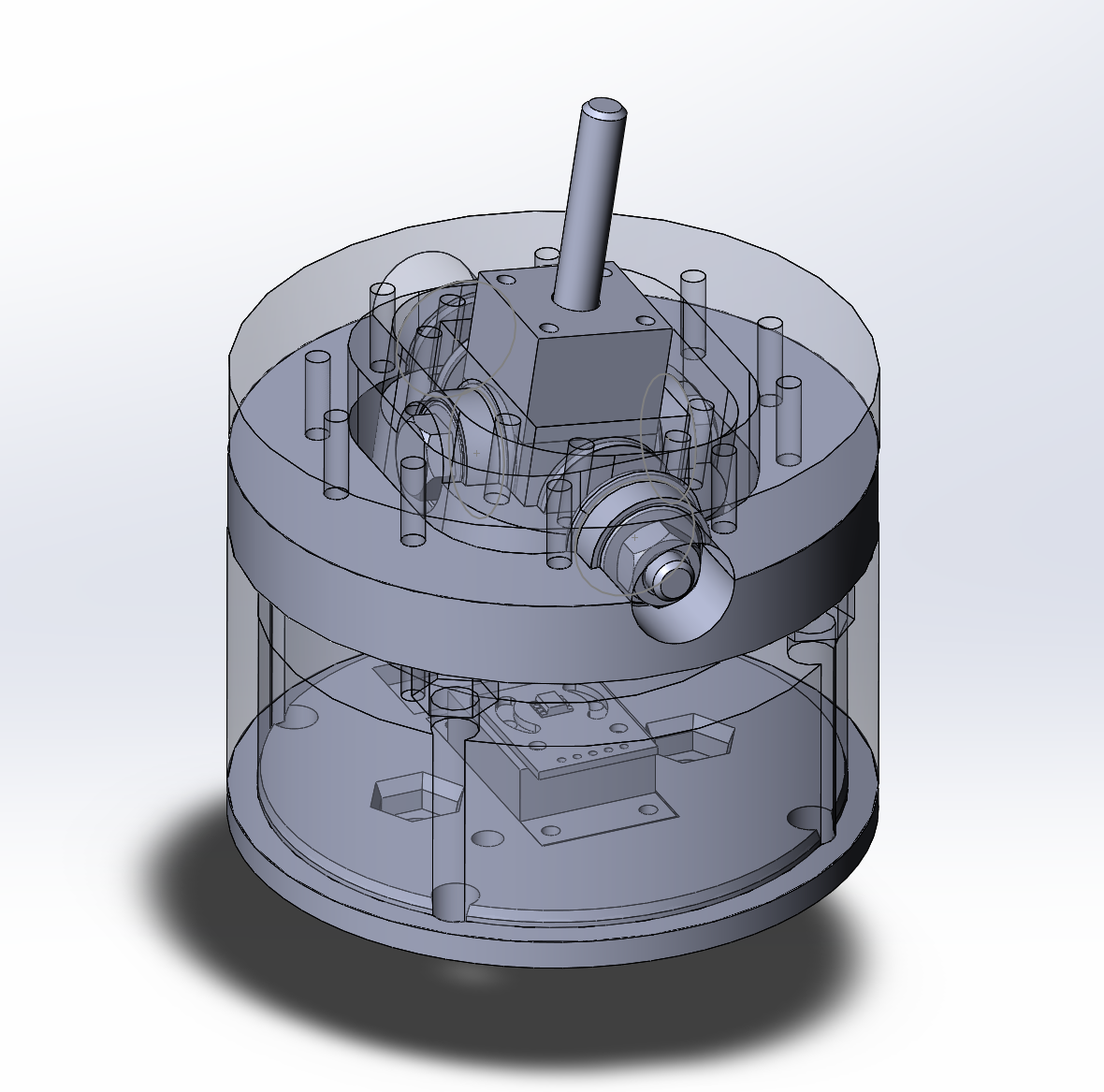
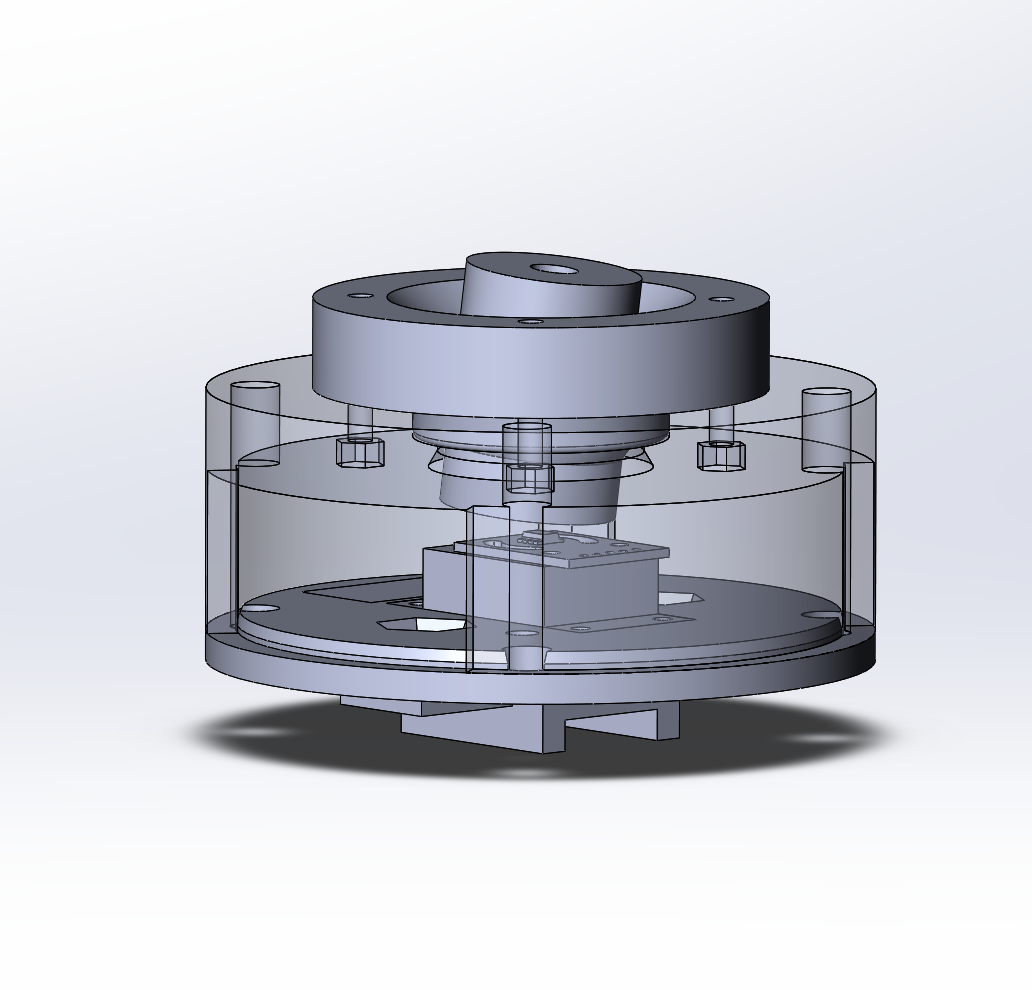
I have finally managed to build the gimbal, and even tried flying with it on Aerobatics Online Caucasus sever in DCS =)
I can say it’s great! For now, I’ve used rubber bands for stick centering, and they work pretty well. I noticed that I haven’t been using the software force trim function much during this flight. A lot of heli pilots were online, so I’ve had a great opportunity to put both the gimbal and pneumatic mod for the collective to a good test 😀
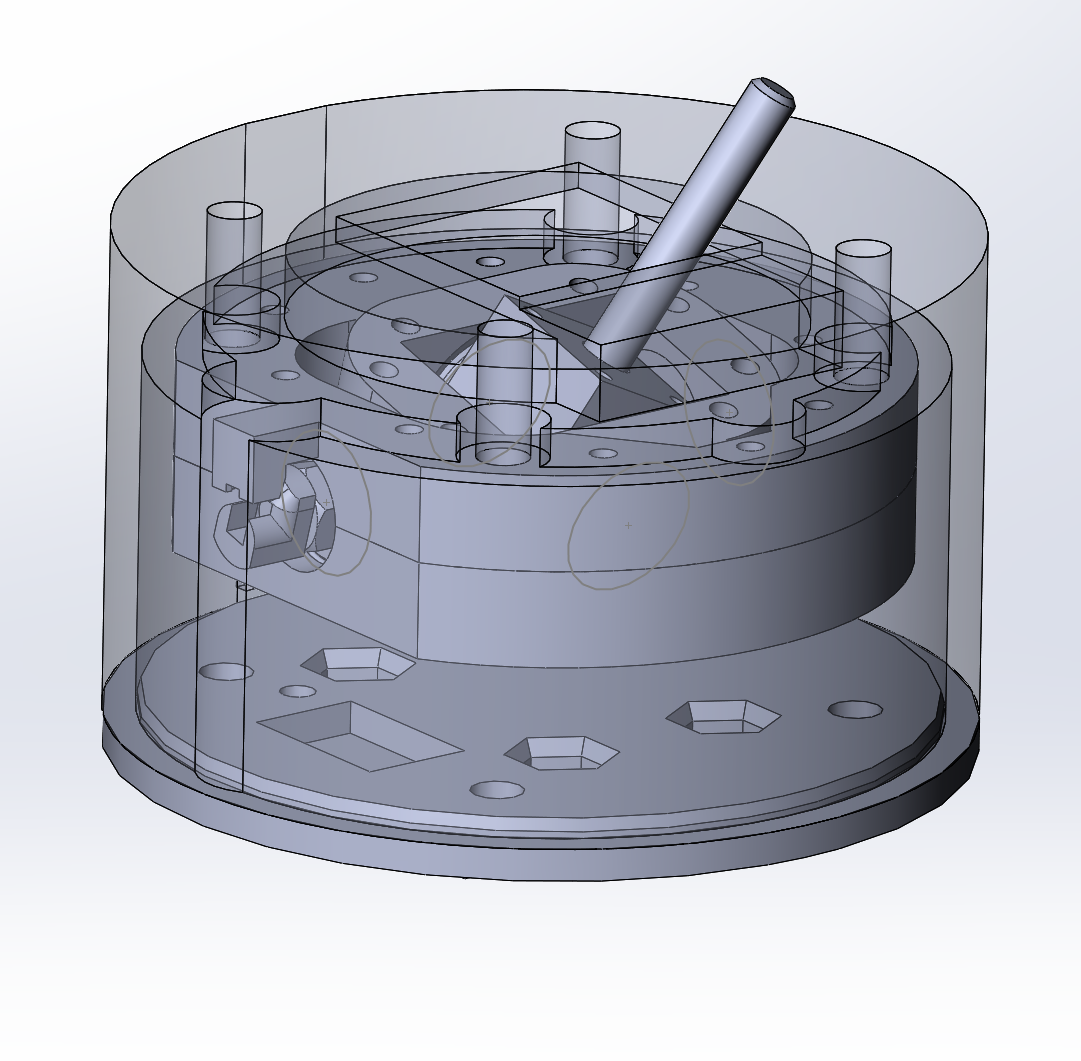
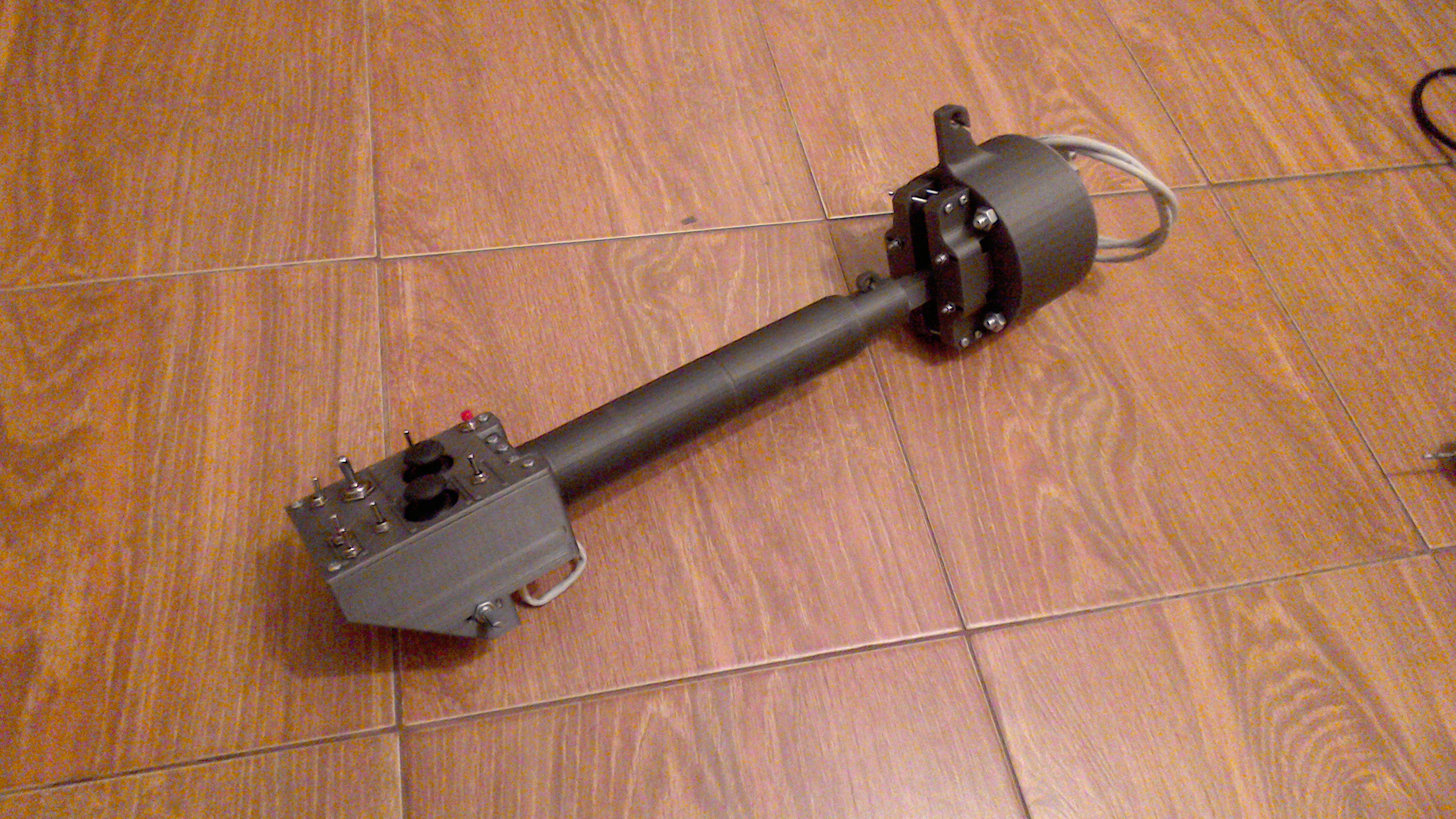
I am waiting for 50mm MAL16-50 pneumatic cylinders to arrive, hopefully with them installed the stick will feel perfect. The collective pneumatic mod still holds together, I am beginning to think it’s really safe to use. A couple more weeks will show if I am wrong =) The new gimbal will be released tomorrow, if time permits, I will also be making a couple of videos about the new stuff soon.
Stay tuned!