It’s been a while since my last post, mainly because I have been working on the project wiki, which is now filled with documentation! Some stuff was just copied from MKIII manuals, but a lot more has been written from scratch. I am happy to say that we are nearing the point where each of the released components will have a detailed building manual.
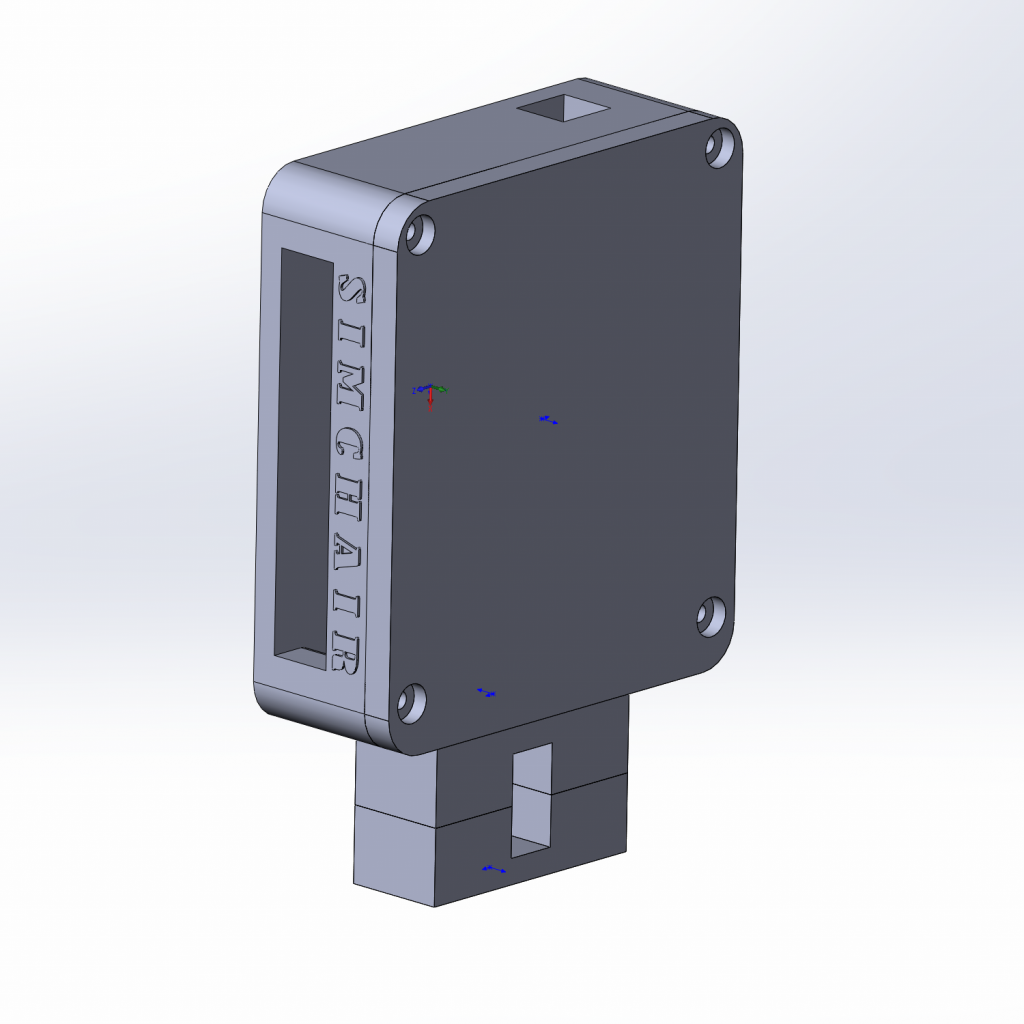
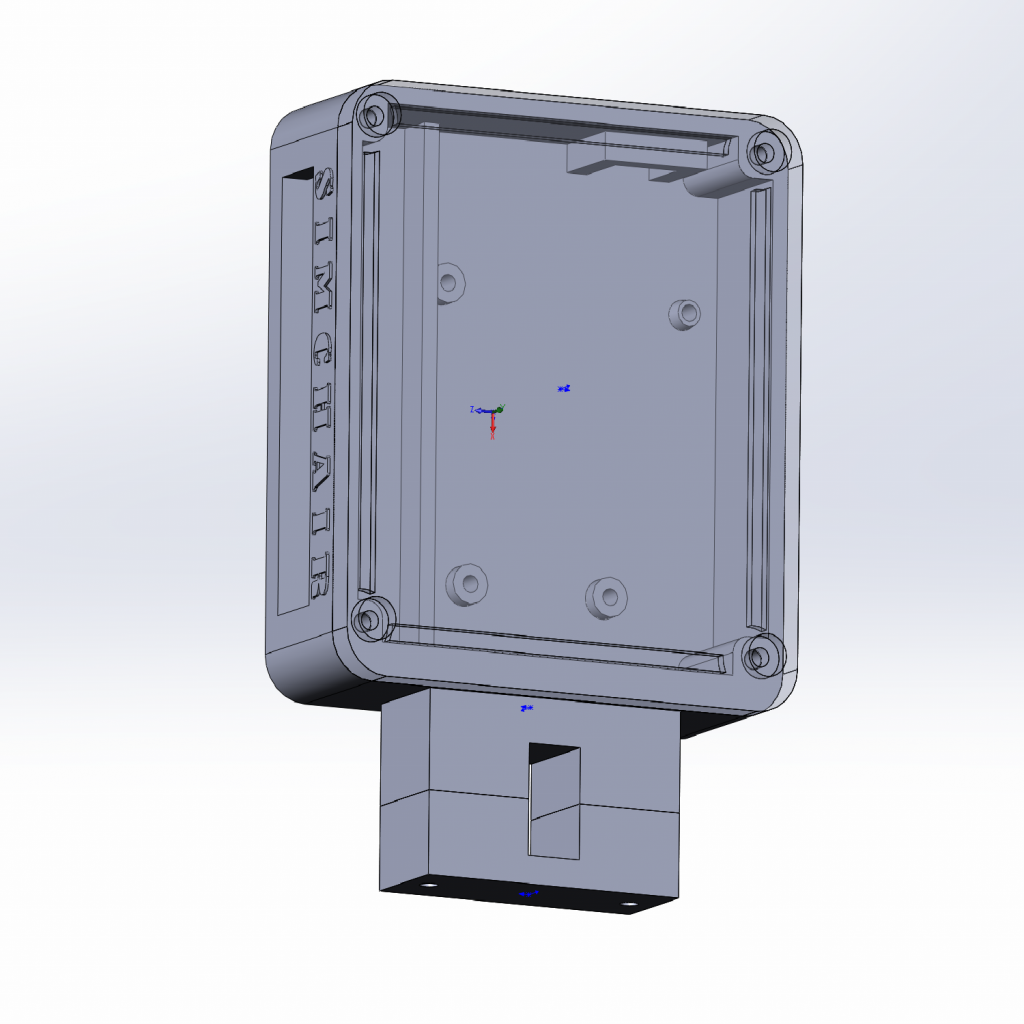
New hardware piece is coming soon – the MKIV simple collective.
It’s an awesome thing in its own way – beautiful in its minimalism, inexpensive, compact device that still supports all MKIV features, sporting 2 physical buttons and a momentary switch, which are extended to a total of 12 buttons when used with MKIV base mode switch. It supports advanced throttle features (software idle-stop detent) and can be operated with or without the pneumatic mod. It’s also very portable and can be used with motion platforms. You can also fit MKIV base extensions (pedestals at the moment) onto this lever, enabling you to control switches and knobs in your virtual cockpit with your left hand, which is especially useful in VR!
This is a perfect device for helicopter enthusiasts that have limited space in their sim pit or want an inexpensive but feature-rich device.
The latest software update contains the following changes:
- MKIV simple collective support added
- fixed a bug in tactile detent mark handler function, that was affecting all collective levers; If your lever does not press joy button 3 after you have pressed the IDLE REL button and closed the throttle, or advanced functions do not work – install this update.
- cyclic/pedals filtering is now disabled by default; It really doesn’t affect anything but input lag. The hardware is definitely precise enough to fly without filtering.
- a few other less significant special throttle functions related bugs fixed.
Stay tuned!