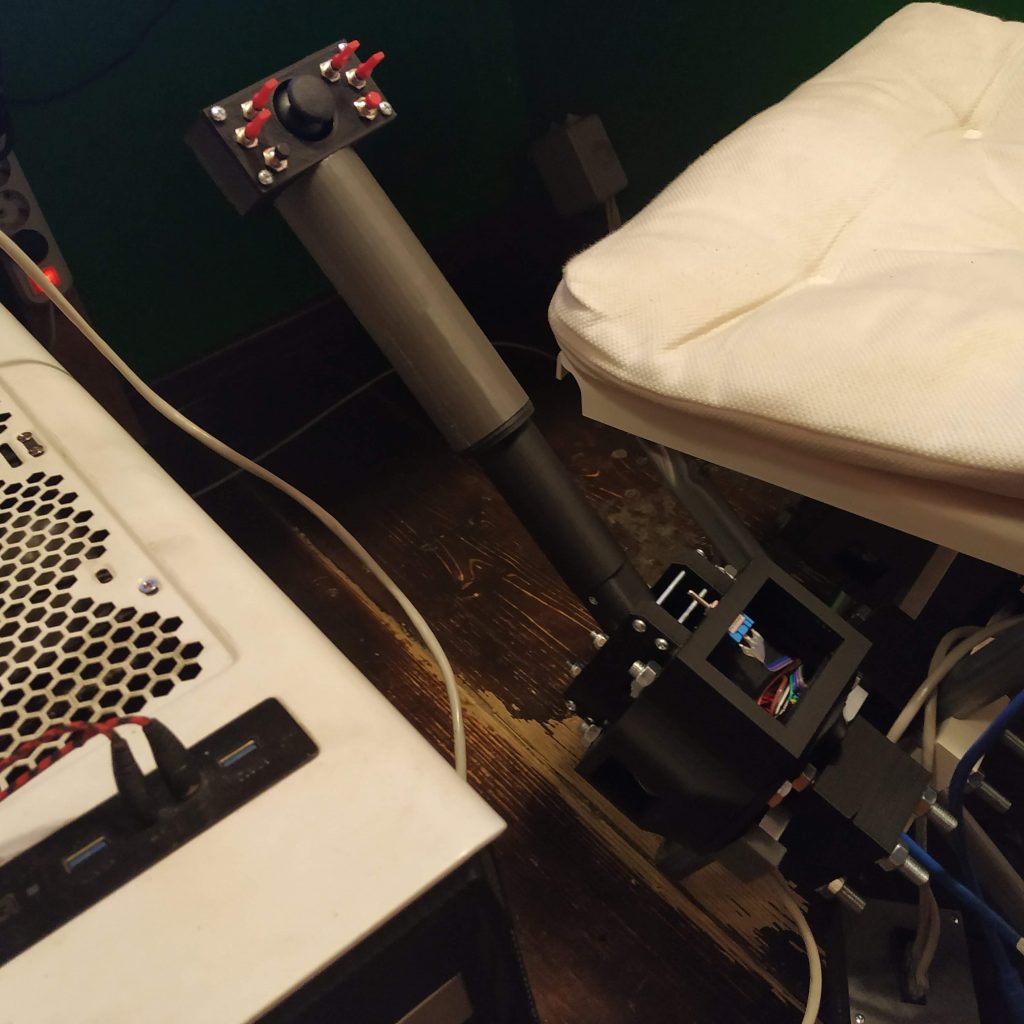
I’ve been able to make a couple of videos to show new devices in action, with simple pedestal among them! I really liked it, for me it solves the mouse-in-VR problem perfectly. It can be easily found while wearing the helmet, and position of controls on it allows for comfortable operation.
In the first video, I talk about MKIV line, the new firmware, and show the new collective base, the pedestal, and a simple collective MKIV lever body parts.
The second one is an extension to the 1st one, in which we can see how the new hardware and software work together in flight. This time controls were captured with a separate wide-angle-lens camera!
I have ported essential stuff to the MKIV master firmware today and had a few minutes to make a couple of circles around the runway to test it. At the moment, we have the support of the following peripherals in the firmware:
compact collective (at the moment MKIII simple collective- axes only)
simple pedestal
cyclic base (MKIII/MKIV)
B8 grip
pedals
All special stuff like force trim, sensitivity switching, etc, works already. For now, each device shows as a separate joystick. Here are a few key features of the new firmware:
the user specifies connected devices manually by uncommenting corresponding lines in “device_definitions” tab
software is now modular by design – every device can be disabled or enabled separately
controllers are now infinitely stackable – user can choose what device goes where, the only limitation is – cyclic base, grip, and pedals should belong to the same controller for special stuff to work!
an infinite number of devices can be included in the firmware thanks to the new modular design
custom devices (mods, variations, etc) can be added in a way so those won’t interfere with firmware updates!
no more limits on axes and buttons – if we need more for some particular device, we just add another controller! All devices have unique joystick ids that will provide at least a certain order of controllers in games. That means, e.g. a throttle quadrant plugged into controller #3 will still appear in joy.cpl with e.g. id #5 – below other devices plugged into controller #1, that e.g. have ids #6 and #7.
minimalism – joysticks only have what’s needed now instead of trying to fit stuff into 3 predefined joysticks, e.g. pedals only have 1 rudder axis and nothing else. Among other things, this helps with identifying devices. It results in some overhead, that may lead to additional controllers needed. I may unite essential flight controls into 1st joystick (axes only) while keeping the rest of the stuff separate.
the code is mostly cleaned and reformatted for better readability
The new MKIV firmware is now live! So far it supports the simple collective (MKIII one) and a new “simple pedestal”, the name will most likely change =)
The most important part about the new software is, it uses a different approach to how devices are set up. If MKIII software was autodetecting devices on startup, MKIV one requires a user to define what devices to expect. This approach allows for saving both RAM and flash memory, and thus we may even end up using a single Leo board, while the library of supported devices can grow infinitely!
The only limit is the number of devices actually connected simulatenously!
Another important change is how joystick objects are used. In MKIII, there were 3 joysticks with a large number of buttons, and all devices used the same set of buttons. In MKIV, different joystick objects are generated for different devices. Some of them will share joystick IDs (e.g. collective levers), others will be unique (e.g. collective heads).
Other devices will be ported into MKIV as soon as possible, starting from MKIV gimbal, B8 grip, and pedals.
I am glad to announce the completion of the 1st manual of Simchair MKIV line. The new line of hardware will take a Linux-like approach – we will have separate compatible modules that can be connected together to form a lever of choice.
The new base is epic, so from now on, the MKIII one is obsolete =) It is fully compatible with all MKIII lever bodies, and you can safely use it with those if you’re building the lever right now.
The first lever body to be released will be the compact collective – a motion-platform ready compact solution with integrated head. An interesting thing about it is that it supports the pneumatic mod, but does not require it! Also, it doesn’t need the counterweight, and that’s important with all lateral loads and shake that can be present when using the lever with motion platforms.
STL’s and sources can be downloaded from the new simchair4_models repo.
I have just finished building the 1st MKIV collective base, and can say it’s great!
Not only its much stronger and more precise, but has a built-in mode switch that can be used for various functions in the software, 2 Ethernet sockets instead of a cable with a plug, and can be flashed through any of these sockets – with any USB-UART board! For cheaper boards without the DTR pin it has an MCU RESET button, that allows it to be flashed with manual reset in the process with stuff like PL2303 (which I no longer recommend using, just buy an FT232TL based board which is roughly the same price but installs drivers for itself and resets ProMinis automatically).
I actually liked ” live ” flashing and calibration more than I thought I would. The lever body itself is the first one intended to work with motion platforms – it’s strong yet lightweight, so lateral loads should not be a problem for it. The head also features the same set of buttons as the Huey-style head – but can be operated without the pneumatic mod.
Now, let’s look at what has changed. The new base has its Pro Mini connected in the following way:
Mode switch left pin -> Pro Mini pin 2
Mode switch GND -> GND next to RST
Mode switch right pin -> Pro Mini pin 3
MCU RST button -> between RST and GND next to it
SS495A1 pin 1 -> THR POT left pin (on the left when the lever is mounted as usual) VCC cable tie <- Pro Mini VCC <- Ethernet sockets pin 1
SS495A1 pin 2 -> THR POT right pin -> GND cable tie <- Pro Mini GND <- Ethernet sockets pin 2
A0 -> SS495A1 signal
A1 -> THR POT signal
A4 -> SDA cable tie <- Ethernet sockets pin 3
A5 -> SCL cable tie <- Ethernet sockets pin 4
Collective head I2C cable -> VCC, GND, SCL,SDA cable ties
Here’s a first flight test video of the new cyclic gimbal! I am happy to admit I was completely satisfied with its performance. It feels very rigid and is slightly more precise than the MKIII version!
This gimbal takes the best from the MKIII reinforced model and adds even more strength and precision along with some usability improvements!
The device has 3 Ethernet sockets – 2 for I2C bus connections (one for the grip and one for the base – no more cable with a plug) and one for FTCR button. The weight of a new base totals at 2,12 kg! It can be mounted to the GUNDE chair onto the same rail as before, but it needs to be reversed as shown on the picture below. The master controller will be moved to a more convenient place.
It will be released fairly soon after some testing will be done. Meanwhile, you can try it as well – MKIII assemble guide can be used as a reference until the new one will be posted. Note that you will need 18x8x6mm threaded hubs.
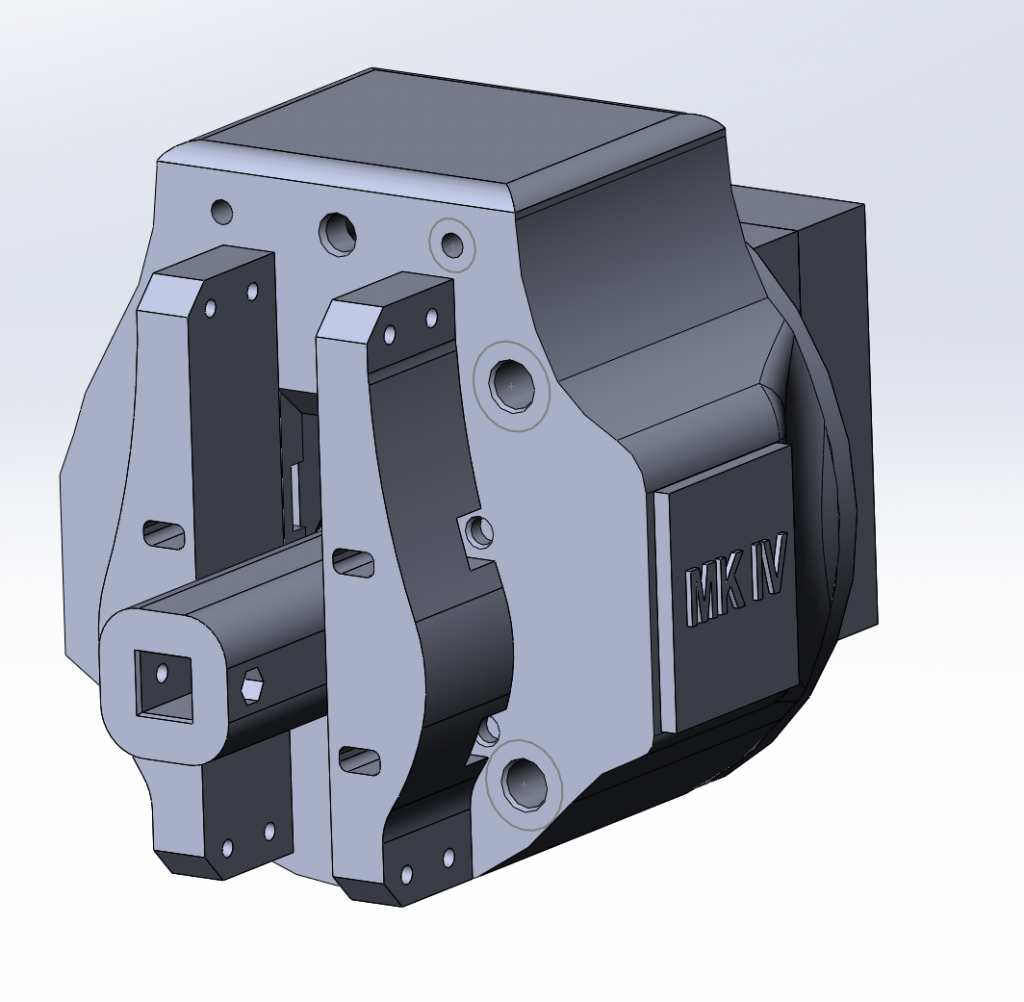
Finally, Mark IV base files are available for download! Assembly manual will be posted with its release, which will happen quite soon.
All major stuff was tested and should fit together nicely at this point, so we can call it a release candidate. For now, you can use MKIII software with it. Later, some cool new features like mode switch, MCU reset button, and easy flashing support will be added. The base is compatible with all MKIII levers.
2 * 18mm long 6x8mm threaded hubs are needed to assemble it.
Guys, I would like to hear your opinion. I’ve been thinking of a way to go past the memory limitations of Leonardo board, while continuing using the Joystick library, that really helps to keep code simpler.
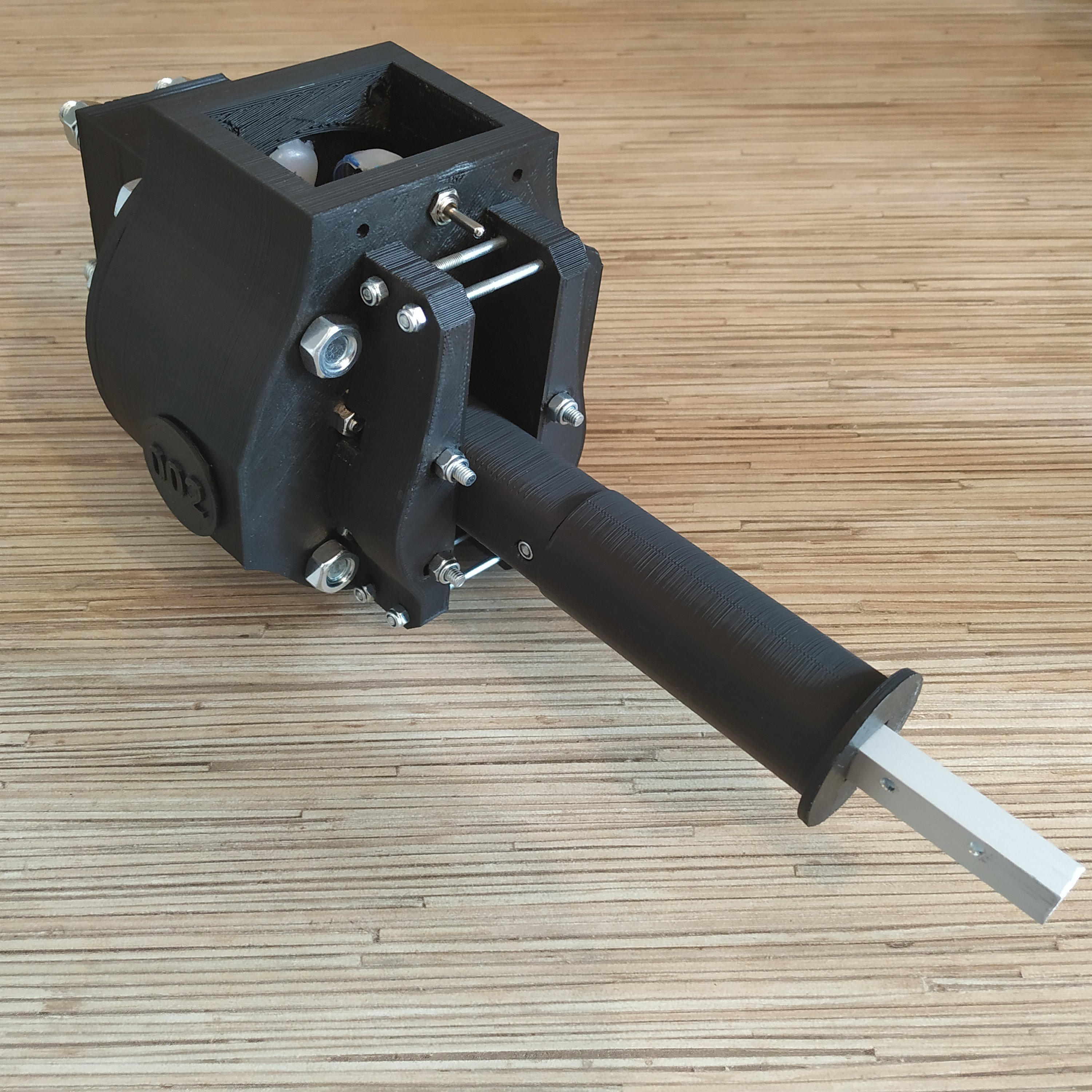
In the previous post, I’ve shared some ideas on the 1st MK4 device, the simple collective. One guy asked me about motion platform compatibility, and I’ve decided to make a lever, designed for use with one. That means no counterweight – and thus the lever needs to be compact and lightweight, so no heavy head.
With this in mind, I decided to modify the base and introduced a pedestal – a small panel on the top of the lever that can be used to place some switches and other stuff, like the radio panel. The cool thing, the mount is standard and allows for mounting pretty much anything you want there (as long as it doesn’t interfere with comfortably placing your hand onto the lever)!
That means, to keep things functional and cool, we need a mode switch and some related software magic. Probably, for each of devices! That, in turn, means a lot of code, and looking at the current situation, there’s no way to put it into a single Leo board.
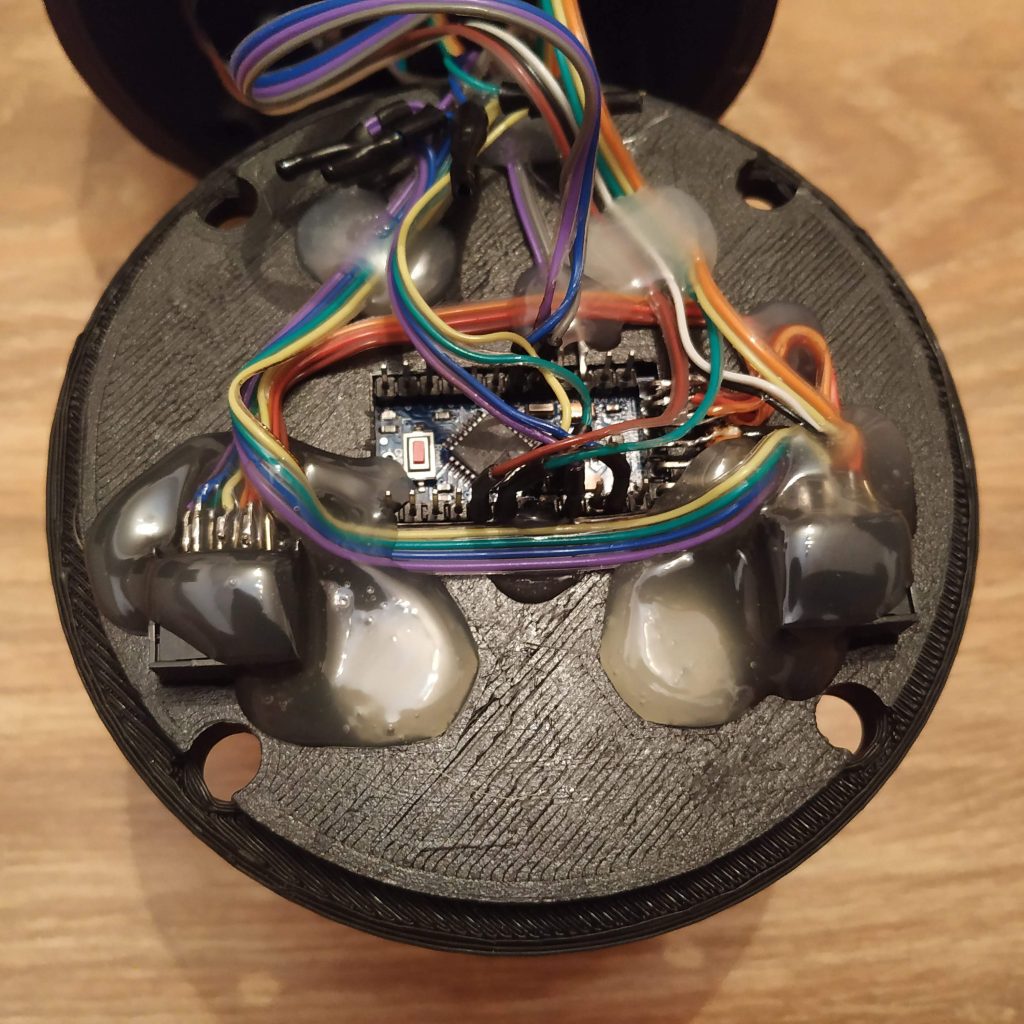
Simple colletive with a basic pedestalYet another pedestal idea, The ministick can be used to replace a mouse in VR, or smth like that
So, here are few thoughts about what I would like to see in MK IV controller:
3 independent Leo boards: one for collective, one for cyclic and pedals, one for miscellaneous stuff
flashing peripherals from the controller (integrated USB-UART board and a separate RJ-45 socket for flashing)
modular design – user manually chooses devices he wants to include in the configuration tab
built-in USB hub
I would like to hear your thoughts on this and what else can be added / changed to make it better!
As you guys probably noticed, there’s been only a fairly moderate number of updates lately. And that’s because I’ve been actively working on the 4th generation of devices!
We will actually see the first one quite soon – here’s the new compact collective lever!
I ‘ve been wanting to resurrect an early MKIII model of the simple lever for a while now – for those of us who just want something reasonably compact and inexpensive, yet precise and functional. It features 2 pushbuttons and a 2-way spring-loaded switch – you can operate a starter, throttle latch and a governor with these. It may also receive a mode switch installed to the base to triple the number of buttons and an MCU reset button for effortless firmware updates.
This lever does not need the pneumatic mod – and that saves a lot of space in your flight cubicle. Otherwise, it’s 1:1 same size as the MKIII single lever.
Every part of the collective was redesigned and improved: 4th gen offers even better precision and durability. Single and twin levers will be updated shortly after the release of the compact one.