
Have just finished assembling the B8 stick grip. I can say that the manual here is perfectly correct, have soldered everything as it says and it worked immediately after flashing. No setup required, just flash it. The only thing that needs tweaking is the size of nut sockets – they are too tight, will make them a bit bigger. Quite perfect otherwise!
Twin collective assembly manual released
The new assembly manual is here! It’s been written right in the process of building the lever, so every smallest step is there to avoid possible issues. Follow it carefully, and you should have no problems assembling the lever!
Pedals frame adjusted for easier and faster print
I have made some changes to the pedals frame, it prints perfectly now. Press-fitting the 10x20x300mm aluminum pipe into the frame haven’t been easy at all before this update, I have broken one frame trying to do it. After that, I decided to make some changes to the model so it would be easier to fit the pipe through the rectangular aperture. After some thinking, I decided the best thing would be to incline the aperture to a 40-degree angle. And it worked perfectly! I’ve been able to press-fit the pipe without any problems and it was fixed stiff enough. Also, I have been able to test (finally!) if electronics housing lid screw sockets are of the right depth, and they are. Fifty-millimeter lid screws fit perfectly.
Another cool thing is I have removed some excess plastic to make the frame lighter (it consumes enough plastic already!) and faster to print while reducing a chance of warping of a few first layers. It does not affect the frame strength and rigidness in any way.
Along with the latest sensor mounts upgrades, these little changes make pedals perfect in flight and easy to assemble.
A major cleanup
Hi guys, very good news here. All the stuff is finally on GitHub! Everything is updated to the very latest version, STLs are oriented correctly, just download, print, and fly.
This repo will be the only supported place to get the stuff from now on. I will add “Downloads” section with a current snapshot of the repo to this site. All the stuff on thingiverse was reorganized and files were replaced with the corresponding links to GitHub (this way you’ll always get the latest stuff without any extra effort from me).
The simple collective was removed, as we don’t really need it anymore because both single throttle and twin throttle levers feel as good, but also support heads. Let me know if you want it back.
Cheers!
Pedals upgrade test flight
Hey guys! A short video following yesterday’s pedals upgrade. That 407 is a pure joy to fly now, even with a tailwind.
Important pedals upgrade
Here’s what has been done to the pedals:
- adjusted electronics housing dimensions so screws will fit correctly
- added nut sockets to the main frame part
- redesigned magnet and SS495A Hall effect sensor mounts (IMPORTANT!)
- changed inclination of apertures for a rectangular pipe in the main frame part to 40 degrees for easier fit of the pipe
- the frame was lightened to reduce chances of warping during a long print
- files renamed to fit the new naming scheme
- everything published to GitHub
This is a very important upgrade! Along with mostly cosmetic stuff, it includes new HE sensor and magnet mounts, that are really game changers. New mounts work the same way as in cyclic or collective levers, and add A LOT of precision! It have been really noticeable when I spooled up the Dreamfoil 407 for a quick test ride. The heli felt unusually stable! As a nice bonus, these mounts noticeably simplify calibration and add some mechanical resistance to drops or accidental hits (this happens to pedals from time to time as the unit usually lies under the table).
Download an upgraded version from GitHub:
Simchair models are now on github!
I’ve been thinking about a good way to organize stuff recently and decided to use GitHub to store models. This is cool because every single change I will be doing to stuff will be instantly available to you guys! I will be adding peripherals to the simchair_models repo one by one in the process of set building.
One more important change: I have added part numbers and renamed everything, so it follows a unified naming scheme now – peripheral_name_part_name_part_number! That means that if you don’t have a 3d printer and want to order spare parts from me, it will be easier to do that.
You can download an updated version of the stick gimbal right now!
The download section of this site will still be available in the current state until all models will be transferred to the repo. and will contain a daily repo snapshot after that.
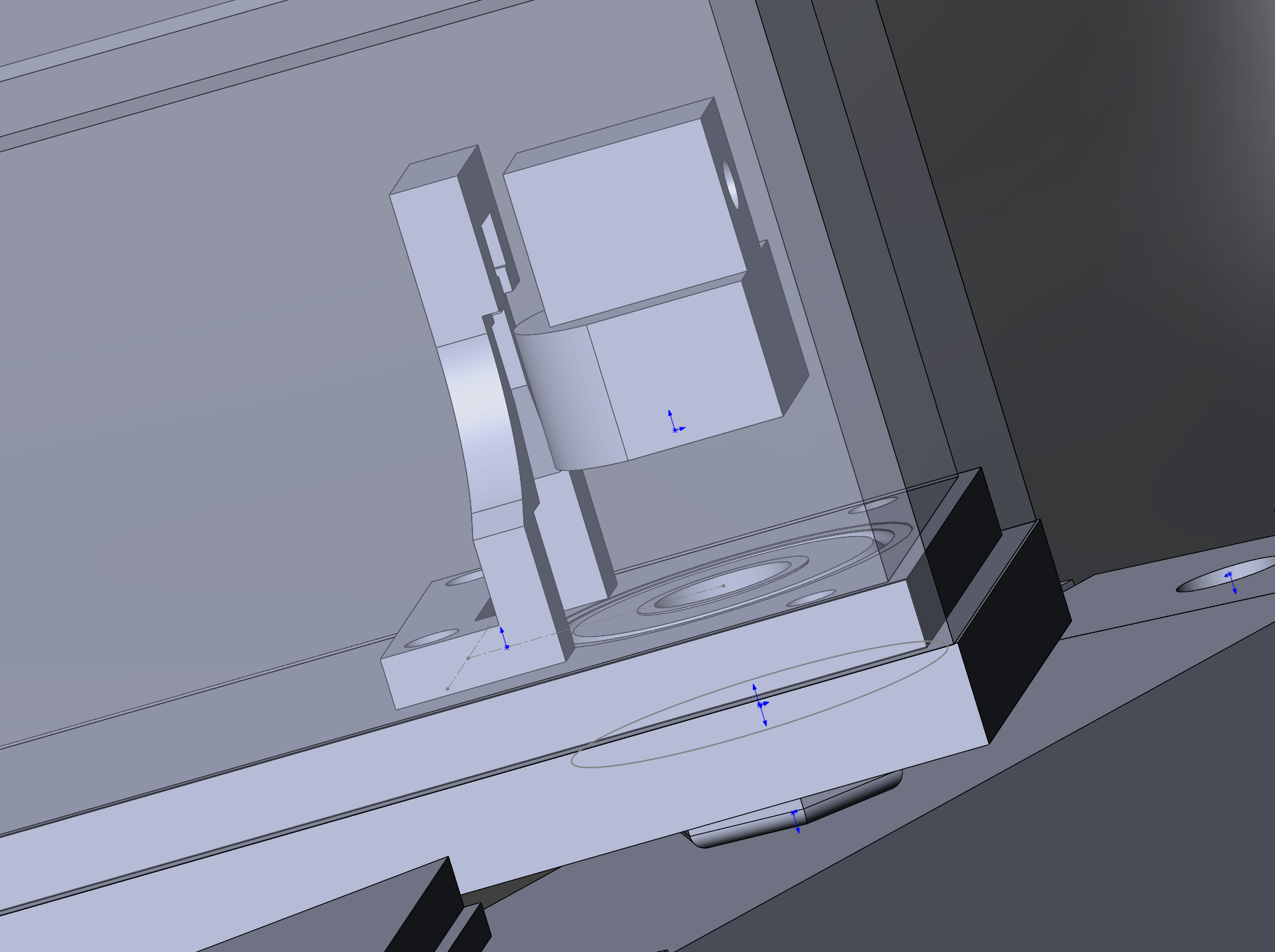
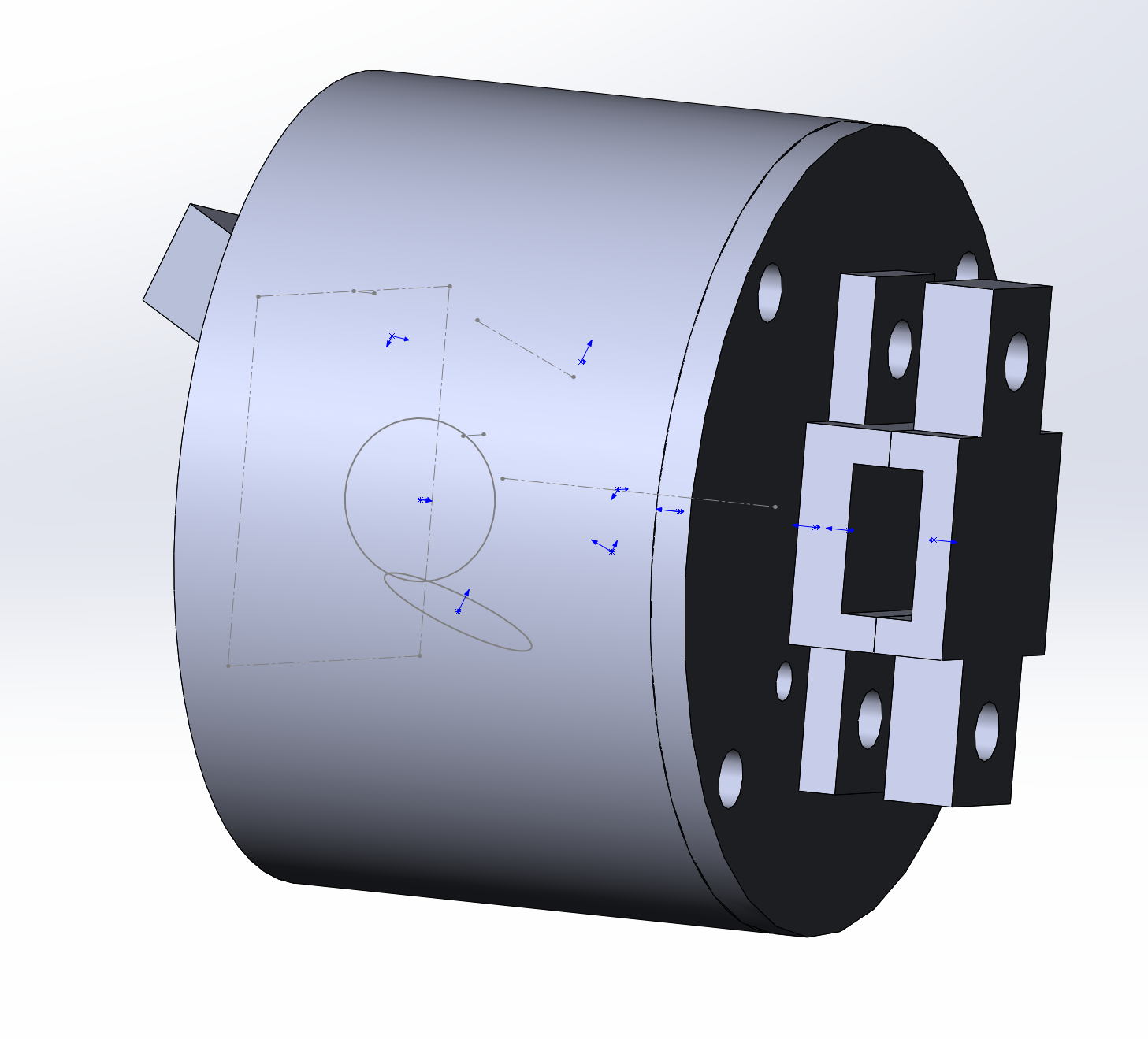
Changes to cyclic gimbal
As I’ve been writing earlier, I am now building two complete sets for my friends. Time to hone things to perfection! First thing I decided to build is the cyclic gimbal. I have printed it and noticed that X and Y frames nut sockets are too tight, a lot of effort was needed to press fit nuts into them. Another problem was the gimbal mount (the one on the bottom lid of the enclosure). It was too tight, so I’ve spent around half of an hour widening it. This is not how it should be, so I finally decided to redesign the thing. It consists of two parts, connected by M8 bolts now. I think this mount will allow for more flexibility (especially for those who don’t use IKEA GUNDE chairs). Here’s how it looks now:
The lid with an old mount will still be available as a mod.
Take a look at the next post for a download link!
Improvements for helicopter pedals
While printing the pedals frame for my friends, I found that the built-in support part I designed to counter printing issues is too close to the rubber bands holder. This is bad, as it is very hard to remove. I redesigned the holder a bit, so it will be easier to print and added a new built-in support part with 0,4mm distance to the holder. I have also added M3 nut sockets to the cover mounting holes. I will update files in download section as soon as the design will be perfected. I also think of changing the magnet mount, as the current design, while good enough and simple, is kinda sensitive to falls.
Stay tuned!
What’s next?
I have been testing stuff for a while now, flying across the US west in an X-Plane Dreamfoil 407, and everything feels and works fine, no hardware failures so far, after a few months of everyday flying =) This means, it’s finally time for refining documentation, which I will do while building two complete Simchair MKIII helicopter controls sets for my friends. Expect major improvements! =)
I’ll start with making a cyclic gimbal.
Cheers!